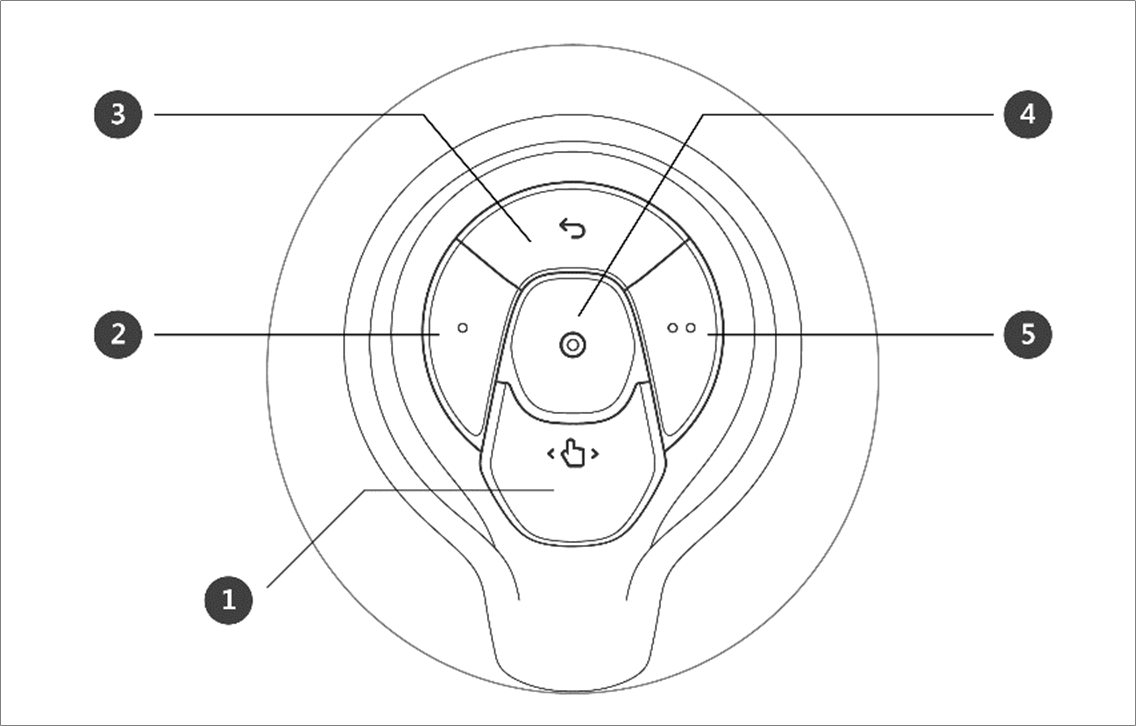
De gebruiker kan de robotpose wijzigen terwijl hij de knop Handgeleiding of aangepaste knop op de cockpit ingedrukt houdt.
|
No. |
Item |
Omschrijving |
|---|---|---|
|
1 |
Hand-Guiding Button |
Deze knop wordt gebruikt om de pose van de robot aan te passen of te veranderen. |
|
2,5 |
Knop Gebruikersinstellingen |
Deze knop kan de robotpose wijzigen door een pose in te voeren die overeenkomt met een vergrendelvoorwaarde die overeenkomt met een modus.
Meer informatie over instellingen vindt u in (2.12.2-nl_NL) Cockpit-instellingen. |
|
3 |
Cancel Button |
Verwijdert de laatst opgeslagen pose. |
|
4 |
Save Pose Button |
Slaat de huidige pose op. Voor meer informatie, zie (2.12.2-nl_NL) Werkpunt van skill-opdracht instellen met cockpitknoppen. |