Verplicht Normaal 15 min.
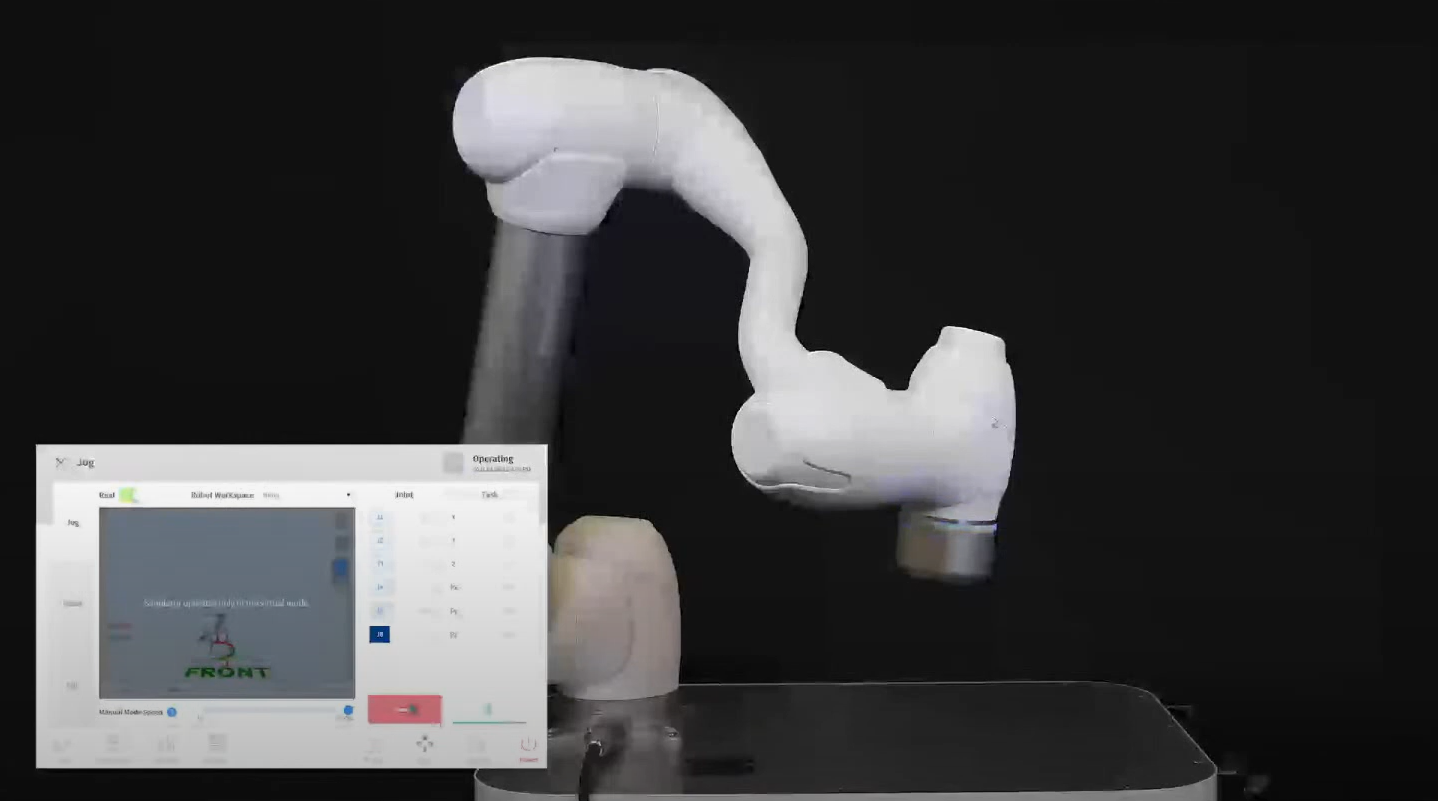
De gebruiker kan een methode voor handmatige verplaatsing selecteren op het tabblad Jog. Zie voor meer informatie over de jog/move/align. Jog-functie
-
Jog: Het verplaatst de robotverbinding of TCP naar de verbindingsas of coördinatenas die de gebruiker heeft geselecteerd
-
Verplaatsen: Het verplaatst de robotverbinding of TCP naar het doelpunt dat de gebruiker heeft ingevoerd
-
Uitlijnen: Het verplaatst het robotuiteinde naar het vlak loodrecht op het door de gebruiker geselecteerde vlak en de coördinatenas parallel aan het robotuiteinde
Robotbeweging bestaat uit twee typen.
-
Gezamenlijke beweging: Het beweegt elke verbinding lineair met een draaiende beweging
-
Taakbeweging: Het verplaatst het einde lineair naar het doelpunt
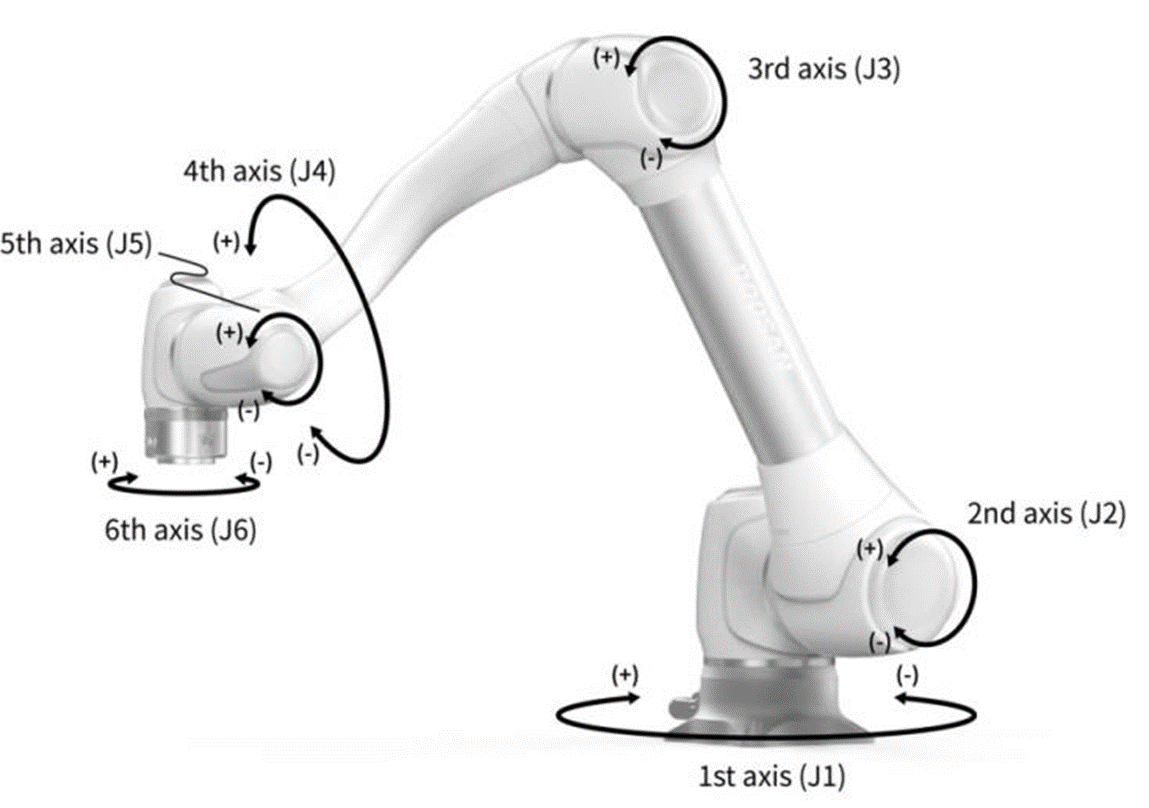
Hieronder volgt de methode voor het verplaatsen van de robot met behulp van de gewrichtsbeweging vanaf het jog-scherm:
-
Selecteer het tabblad Joint.
-
Selecteer de as die u wilt verplaatsen. U kunt bijvoorbeeld J1 selecteren.
-
Druk op de knop +/- om de robot te verplaatsen. De robot beweegt terwijl de knop +/- wordt ingedrukt, en de huidige locatie wordt in real-time op het scherm weergegeven.
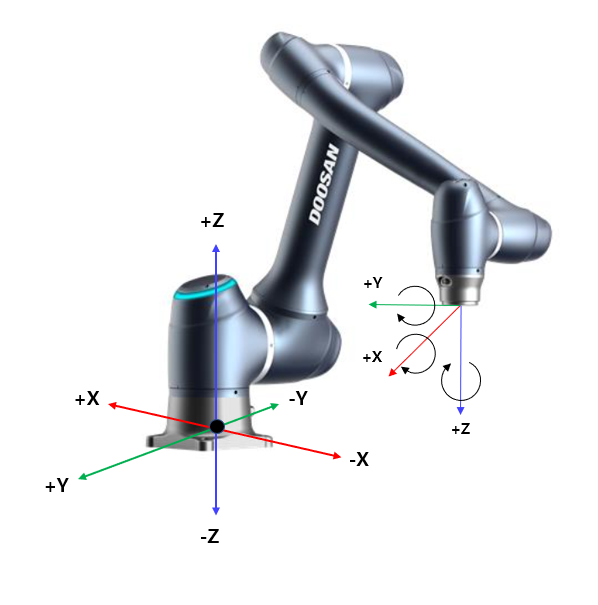
Hieronder volgt de methode voor het verplaatsen van de robot met behulp van taakbeweging op het jog-scherm:
-
Selecteer de basiscoördinaten. De robot kan worden verplaatst op basis van de COÖRDINATEN VAN DE BASIS of de COÖRDINATEN VAN HET GEREEDSCHAP.
-
Selecteer de richting die u wilt verplaatsen. U kunt bijvoorbeeld de X-as selecteren.
-
Druk op de knop +/- om de robot te verplaatsen. De robot beweegt terwijl de knop +/- wordt ingedrukt, en de huidige locatie wordt in real-time op het scherm weergegeven.
Voor meer informatie over jog movement, move and align, zie Jogschermrespectievelijk , Bewegingsscherm en Scherm uitlijnen .
-
Als de tuimelschakelaar van de feitelijke modus linksboven in het Jog-scherm wordt uitgeschakeld, beweegt de robot alleen op het virtuele scherm links van het Jog-scherm. De eigenlijke robot beweegt als de tuimelschakelaar voor de feitelijke modus wordt ingeschakeld.