使用 Jog+ 将允许您在执行不同的工作时同时使用点动功能。
当机器人在示教过程中需要准确移动到目标点时,可以使用此功能。
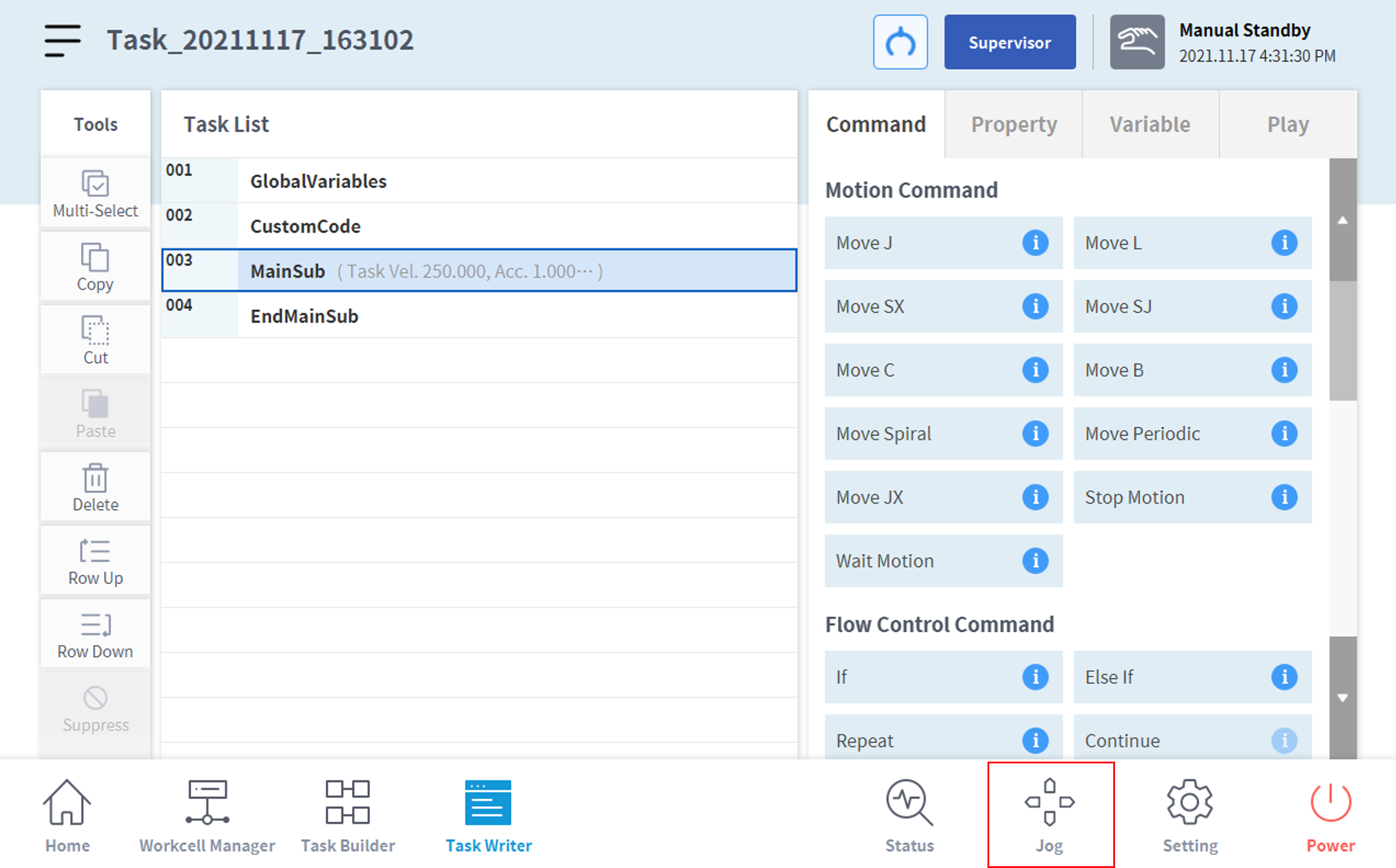
可以通过以下方式激活 Jog Plus。
-
在屏幕底部的主菜单中按住点动按钮 1 秒钟以上。
-
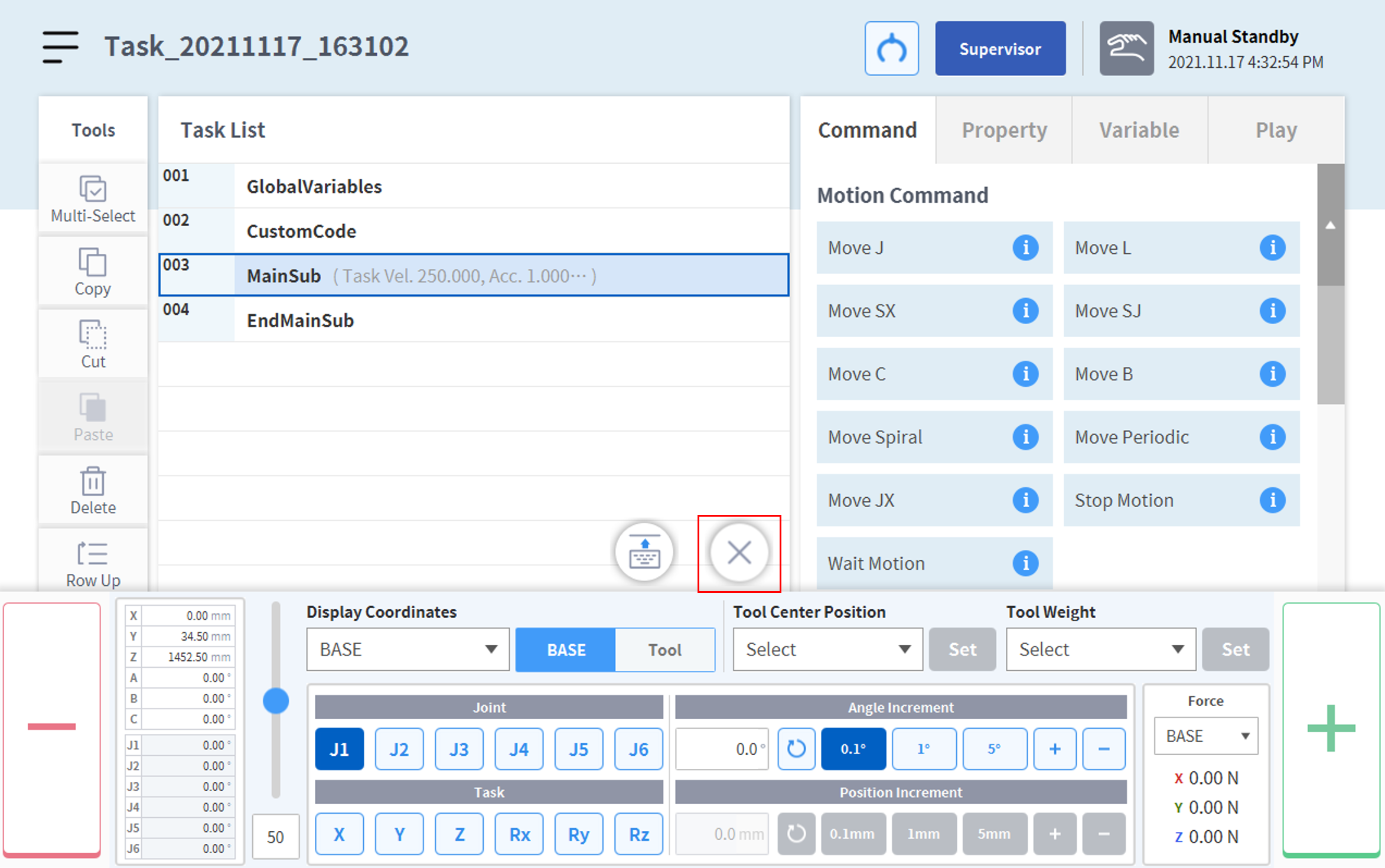
Jog Plus 屏幕被激活
-
可以通过按“X”按钮停用 Jog Plus。
|
编号 |
项 |
说明 |
|---|---|---|
|
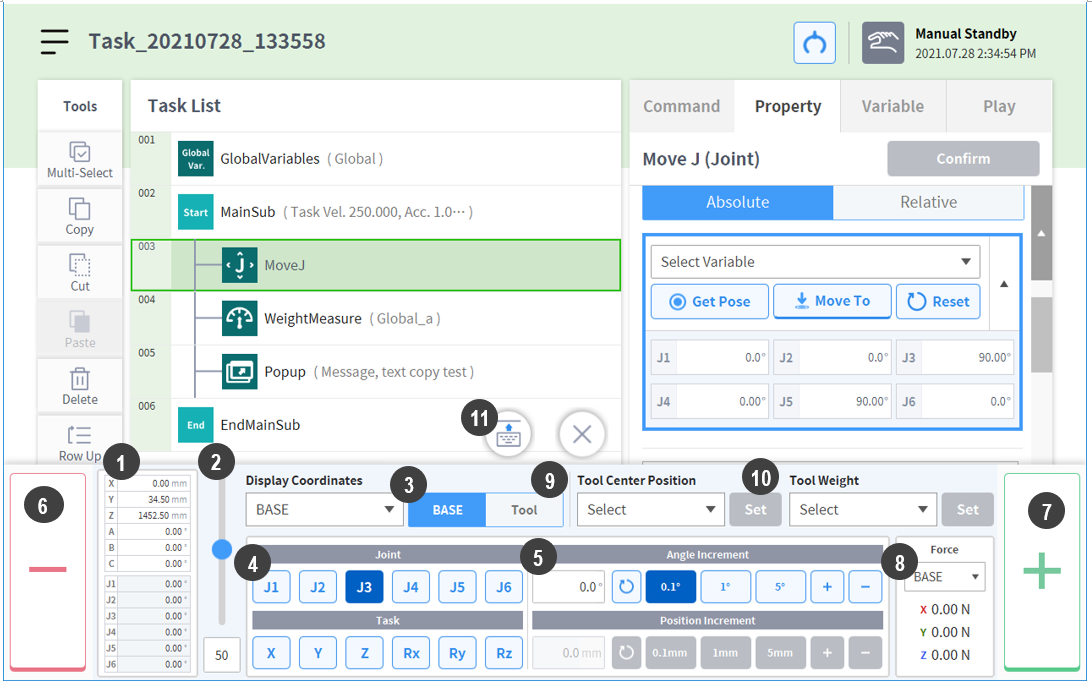
1 |
Current robot pose |
根据设置的显示坐标显示机器人位姿。 |
|
2 |
Manual Mode Speed |
配置手动模式下机器人的移动速度。可以通过拖动滑动条指针来调整速度。 如果滑动条指针为 100%,则 Jog(点动)选项卡上的相应最大关节速度将为 30°/s,最大任务速度将为 250 mm/s。该速度会影响到点动和运动按钮控制的速度。 |
|
3 |
Reference Point Setting |
配置参考点以对齐任务坐标。 底座:基于机器人底座配置任务坐标。 世界:根据设定的世界坐标设置任务坐标。 工具:根据安装在机器人六轴末端的工具配置任务坐标。 |
|
4 |
Select Axis |
选择要移动的轴。 “关节”选项卡:在 J1 到 J6 中选择一个轴。 “任务”选项卡:在 X 到 Rz 中选择一个轴。 |
|
5 |
Select Increment |
输入一个关于所选轴移动量的数字。 |
|
6 |
Move – Button |
如果按住按钮,根据增量位置在 - 方向上移动所选轴。 |
|
7 |
Move – Button |
如果按下按钮,所选轴将根据增量位置在 + 方向上移动。 |
|
8 |
Force Monitoring |
根据选定的坐标系显示发生的外力。 |
|
9 |
TCP Setting: |
设置 TTCP。 |
|
10 |
Tool Weight Indicator |
设置工具重量。 |
|
11 |
Change Jog+ location |
将 Jog+ 位置更改为屏幕的顶部或底部。 |