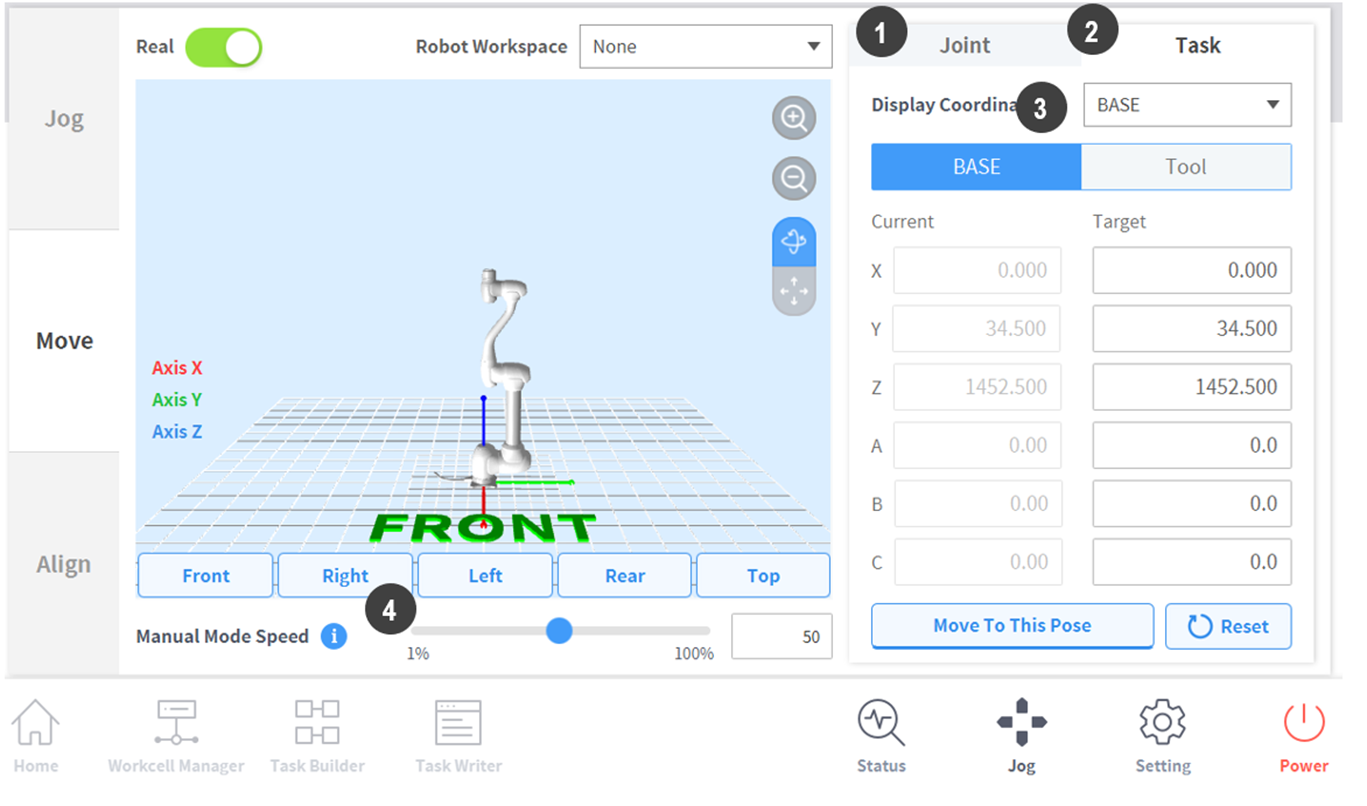
可以按照在 Move(移动)屏幕中的目标角度/坐标移动机器人。如果机器人移动目标位置的坐标已知,或如果必须将机器人移动至以小数表示的坐标,则可以通过输入坐标来移动机器人。
|
编号 |
项 |
说明 |
|---|---|---|
|
1 |
Joint |
配置在使用点动模式移动机器人时使用的参考坐标。 |
|
2 |
Task |
配置在使用点动模式移动机器人时使用的参考角度。 |
|
3 |
Reference Point Setting |
配置参考点以对齐任务坐标。 Base(底座):基于机器人底座配置任务坐标。 World(世界):根据设定的世界坐标设置任务坐标。 Tool(工具):根据安装在机器人六轴末端的工具配置任务坐标。 |
|
4 |
Manual Mode Speed |
配置手动模式下机器人的移动速度。可以通过拖动滑动条指针来调整速度。 如果滑动条指针为 100%,则 Move(移动)选项卡上的相应最大关节速度为 30°/s,最大任务速度为 250 mm/s。速度影响点动和按钮操作速度。 |