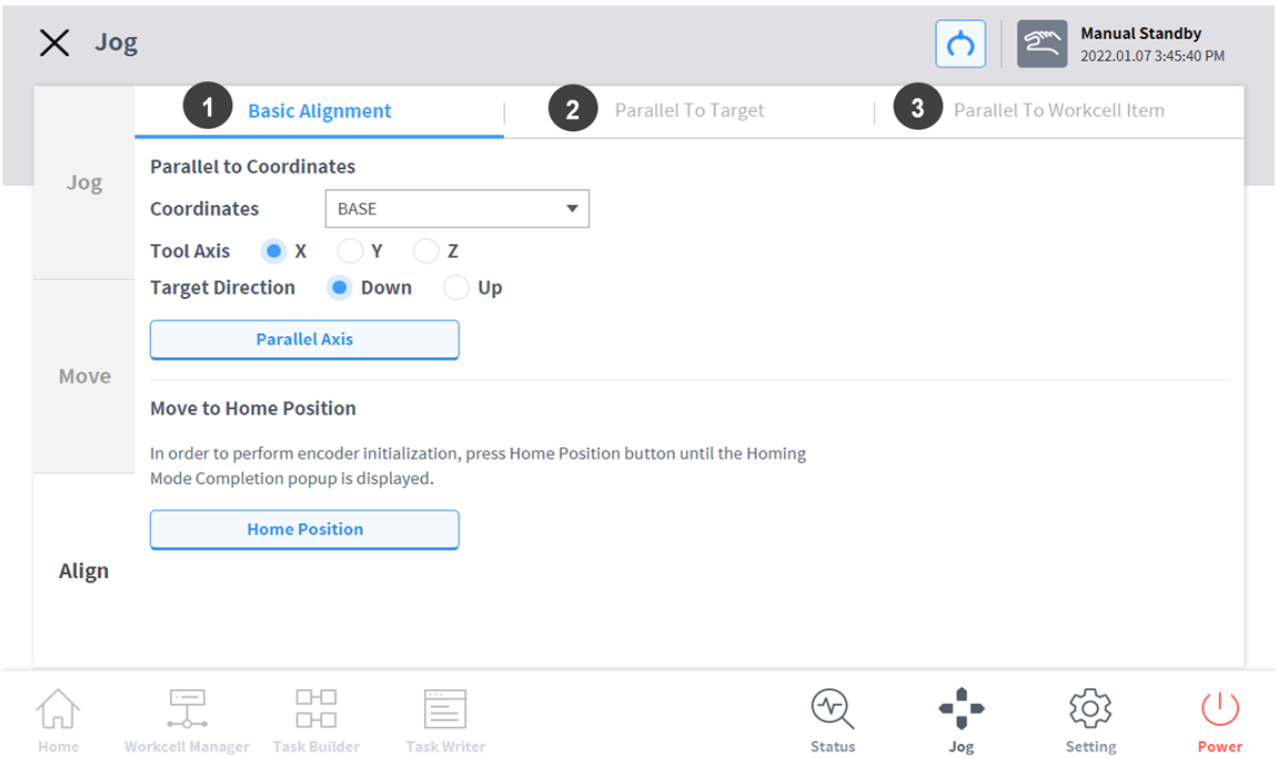
Reference pro zarovnání robota lze nastavit na obrazovce Zarovnat.
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
Základní vyrovnání |
Zarovná TCP podle Základnové/Světové osy a směru cíle. |
|
2 |
Align with Target |
Zarovná TCP s cílem. |
|
3 |
Align with Workcell Item |
Zarovná TCP s položkou Workcell. |