Je to užitečná funkce, pokud je pracovní prostor zarovnán s TCP ve směru osy pro učení obrobku. Chcete-li po uzamčení pozice provést učení, použijte pomocí tlačítek kokpitu funkci přímého učení uzamčeného vzhledem k rovině nebo přímce.
Chcete-li TCP zarovnat podle cíle, postupujte podle následujících kroků:
-
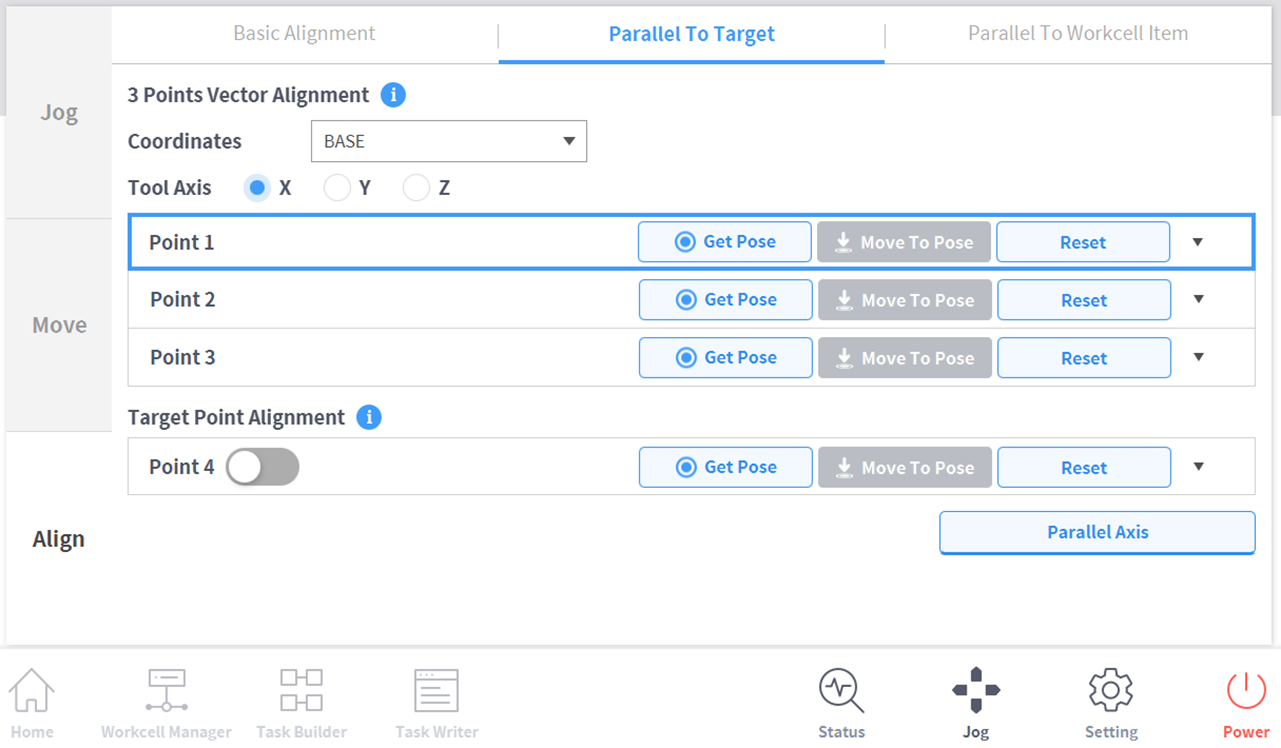
Vyberte kartu Zarovnat a vyberte kartu paralelní podle cíle.
-
Vyberte referenční souřadnice pro zarovnání.

-
Vyberte osu nástroje pro zarovnání.

-
Přesuňte robota do požadované polohy a klepněte na Bod 1.
-
Klepněte na tlačítko Uložit pozici v části Bod 1.Bod 2 a Bod 3 se nastaví stejným způsobem. Když se nastavení dokončí, oblast virtuálního vektoru se nastaví podle daných tří bodů.
-
(Volitelné) Chcete-li nastavit směr TCP i polohu současně, stiskněte přepínací tlačítko Bodu 4, přesuňte robota do požadované polohy a klepněte na tlačítko „Uložit pozici“.
-
Klepněte na tlačítko Zarovnat osu, čímž osu zarovnáte.Šestiosou hlavu umístěte 150 mm nad cíl ve směru osy Z.