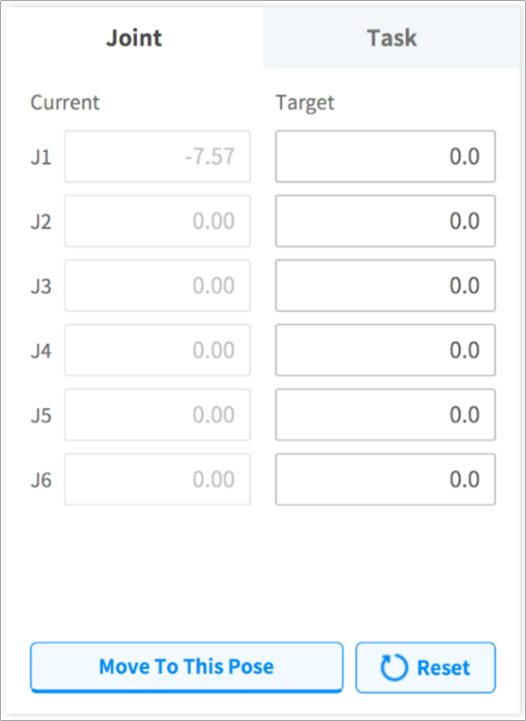
Per muovere il robot ad un'angolazione prestabilita, procedere come segue:
-
Seleziona la scheda Move e quindi la scheda Joint.
-
Inserire l'angolo desiderato per il giunto del robot.
-
Abilitare la Real Mode (Modalità reale).

-
Toccare senza rilasciare il pulsante Move to Corresponding Pose (Muovi alla posizione corrispondente) per regolare all'angolazione del giunto del robot.