Il dispositivo di apprendimento offre la funzione Step Run, che consente agli utenti di eseguire un programma di attività da una fase di comando specificata all'interno di Task Builder/Writer.
Questa funzione può essere utilizzata con la funzione di debug per la creazione efficace del programma.
Questa descrizione spiega la funzione Step Run e il suo utilizzo in base a Task Builder, ma la stessa procedura può essere utilizzata in Task Writer.
Nota
-
Per eseguire l'attività utilizzando la funzione di esecuzione a passi, il robot deve essere nello stato Servo On. Premere il pulsante Stato > Servo On per impostare il robot su Servo On.
-
La funzione Step Run non è disponibile per i seguenti comandi:
-
Variabili globali
-
Codice personalizzato sopra Mainsub
-
Rottura
-
Uscita
-
Continua
-
Segmenti di Move SX, Move SJ, Move B
-
Comandi bambino all'interno di Vision / Conveyor / Watch Smart Pendente
-
Thread e i comandi figlio all'interno del Thread
-
Codice personalizzato utilizzando il file script
-
Lo scenario di utilizzo è il seguente:
-
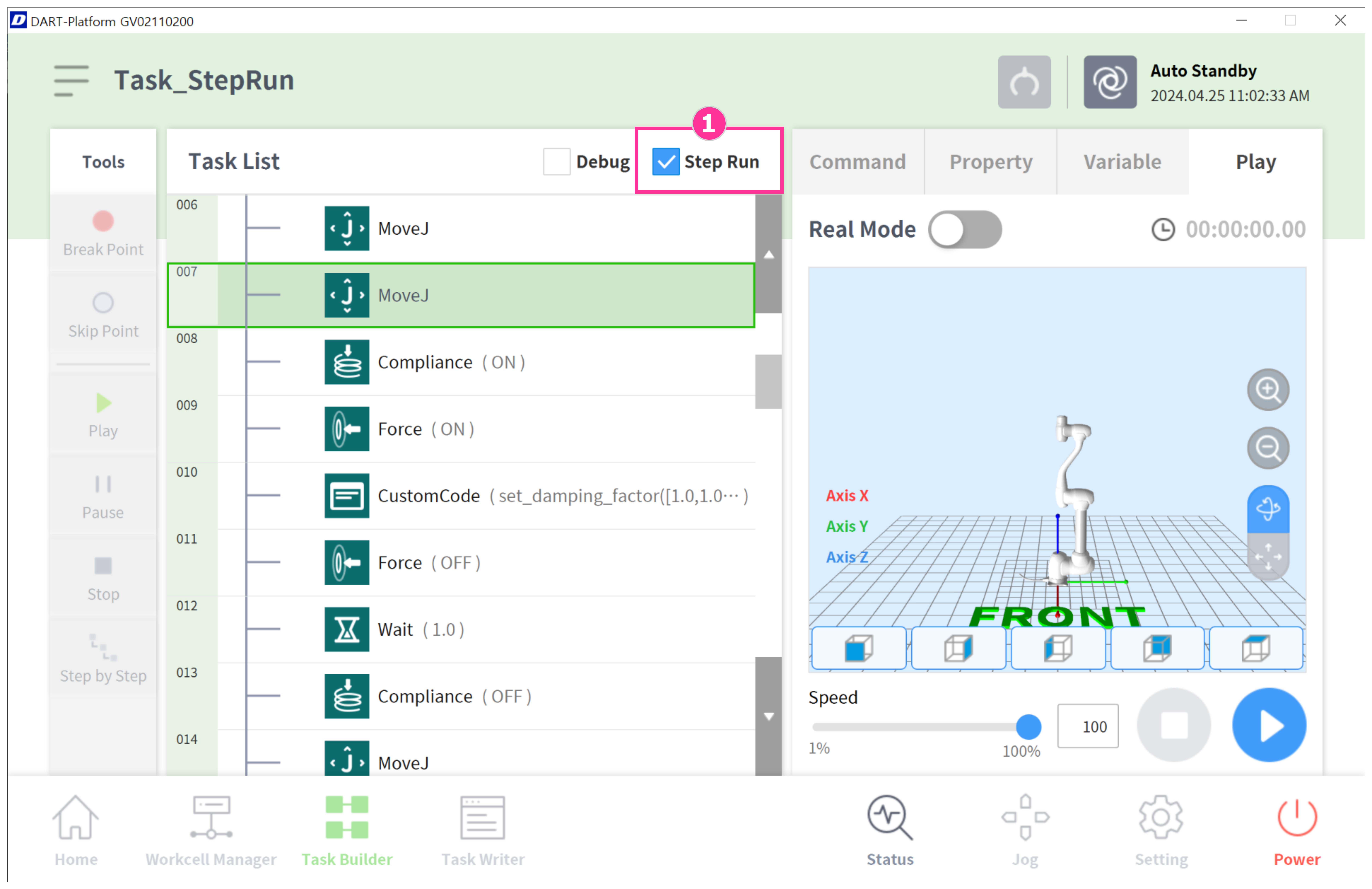
Accedere alla scheda Riproduci in Task Builder/Writer.
-
Seleziona la casella di controllo Esegui passo. (1)
-
Seleziona la modalità di esecuzione del programma. (Modalità reale/Modalità virtuale)
-
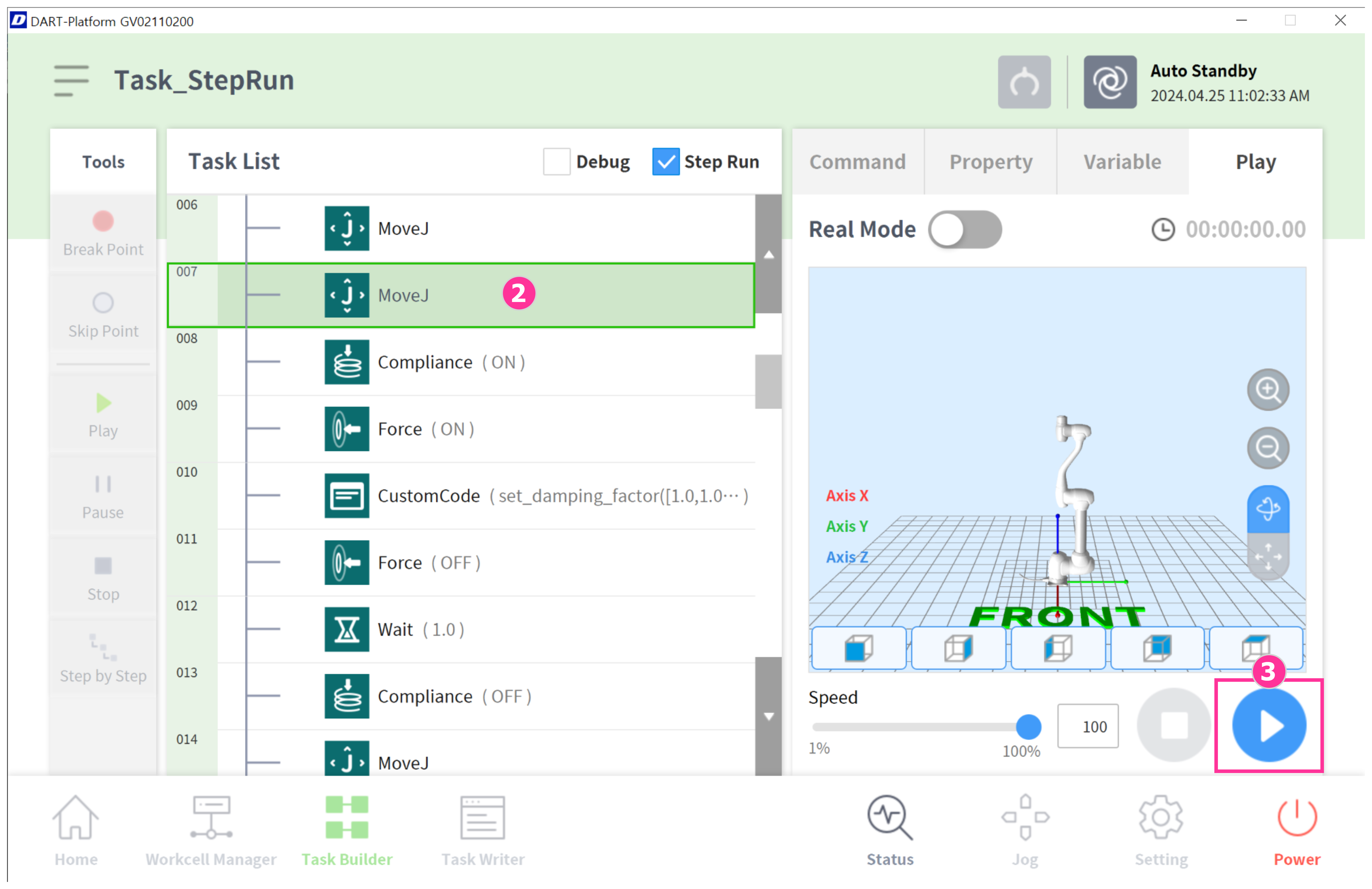
Selezionare il comando da cui iniziare nell'Elenco attività (2), quindi premere il pulsante Riproduci.(3)
-
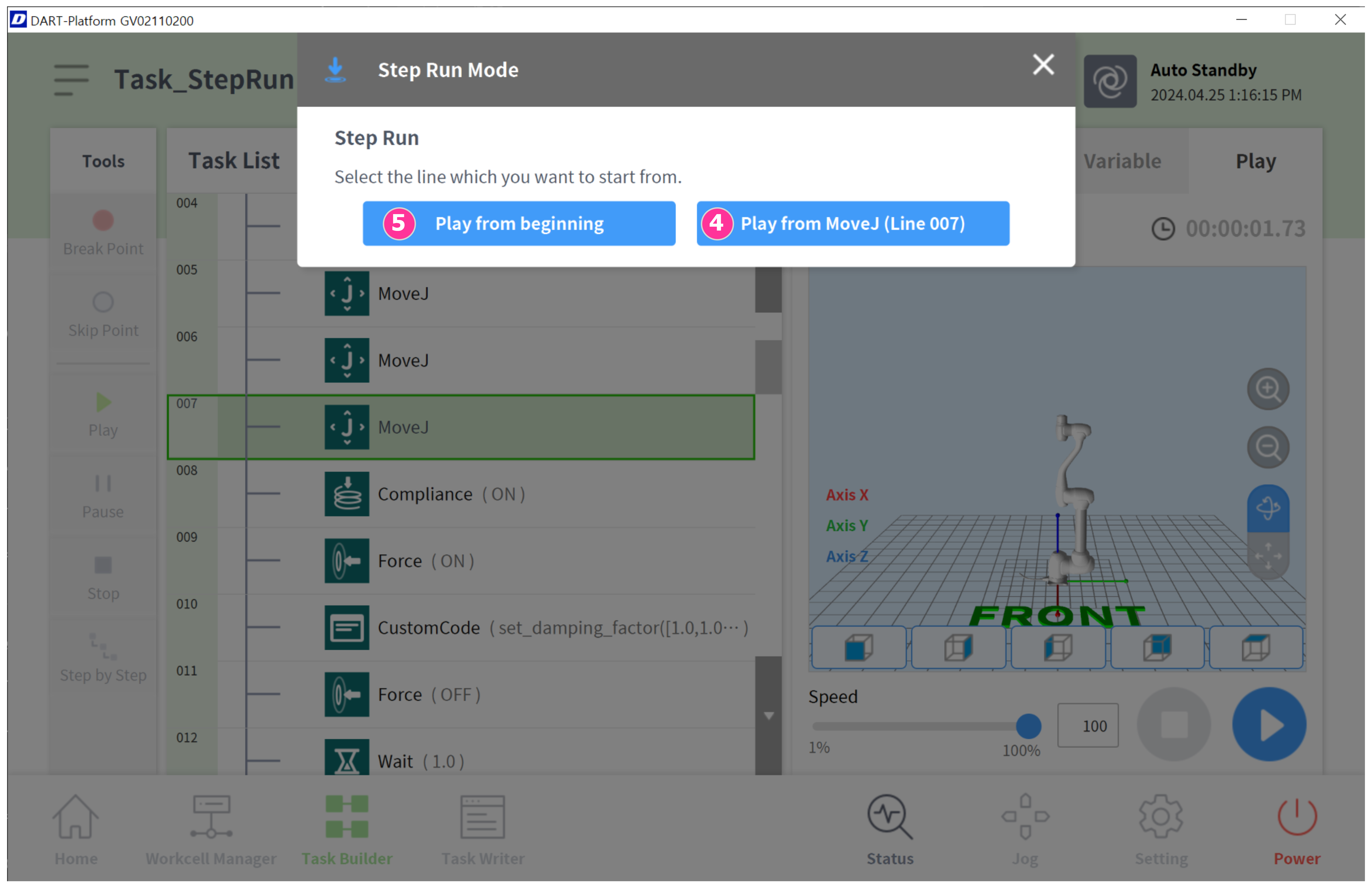
Nel popup Step Run Mode, seleziona il pulsante (4) per avviare dal comando specificato. Puoi anche eseguire il programma dall'inizio premendo il pulsante (5).
-
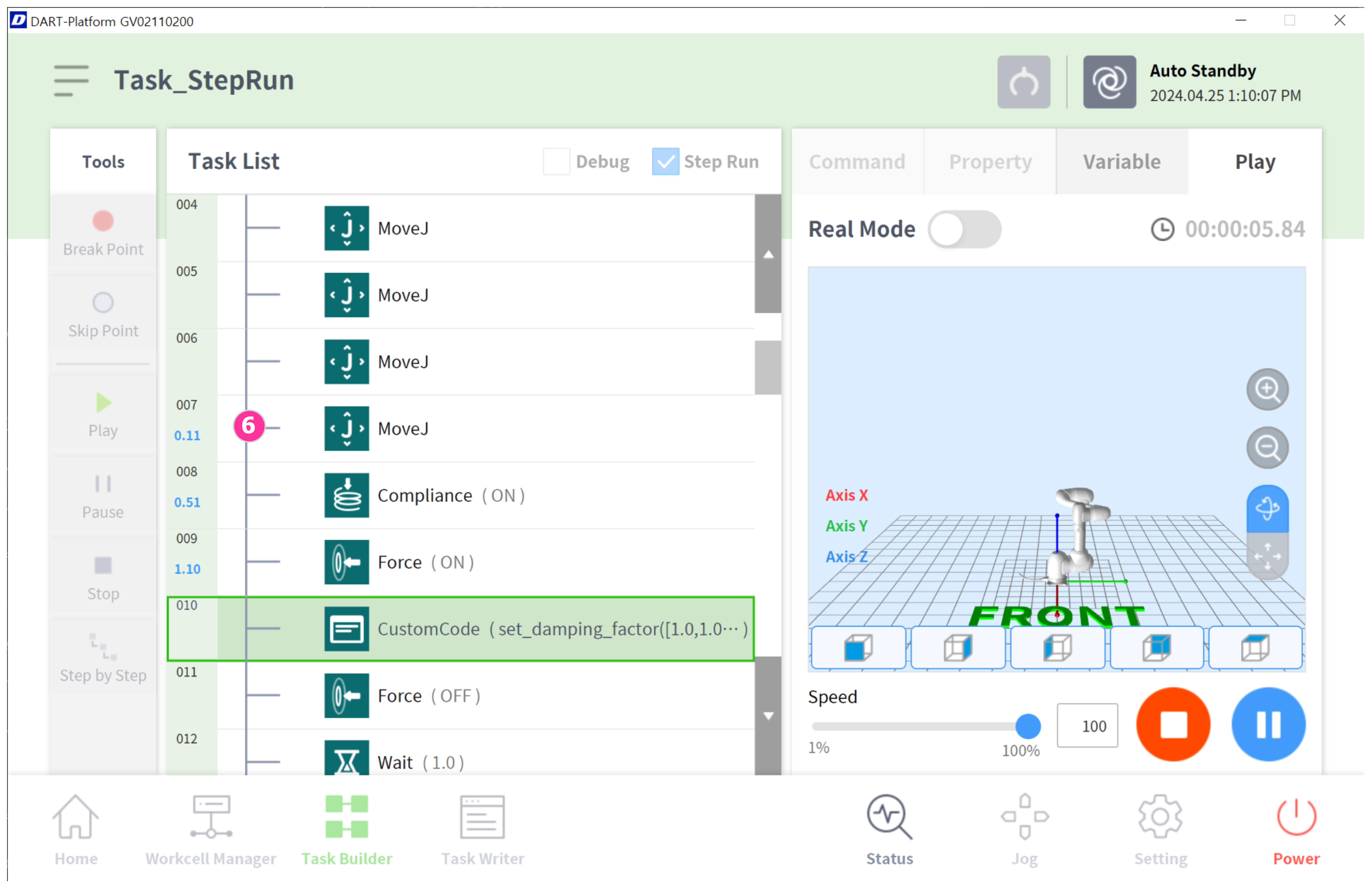
Controllare l'esecuzione del programma dopo aver selezionato l'avvio dalla riga specificata.(6)