入出力情報を確認したりテストするには、メインメニューでStatusボタンをタップしてください。
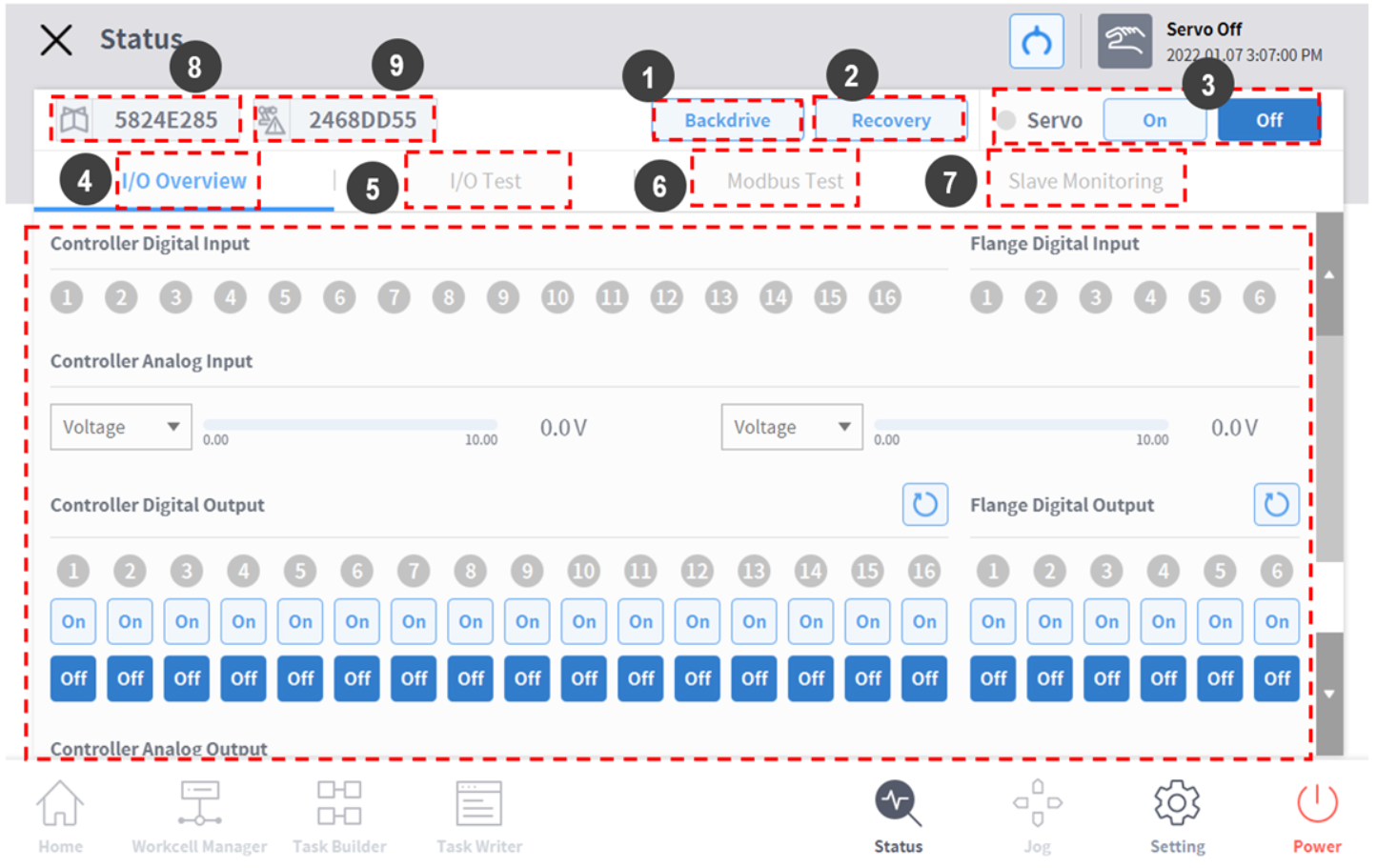
Status画面でコントローラーとフランジに接続された機器の入出力情報を確認し、Zero-Gravity Motion modeとSafety Recovery機能を実行することができます。
Status画面はポップアップ画面です。Home、Task Builder、Task Writer画面で自動モードで実行中でも、メインメニューのStatusボタンを押すと状態画面がポップアップされ、入出力情報を確認できます。自動モードで実行中には出力テストを実施することはできません。
|
番号 |
項目 |
説明 |
|---|---|---|
|
1 |
Zero-Gravity Motion |
作業中に異常が生じてロボットが停止した状態のとき、各ジョイントの電源供給を遮断して位置を手動で動かし、正常な作業状態に戻しておくことができます。 |
|
2 |
Safety Recovery |
ロボットをソフトウェアのリカバリーモードとパッケージングモードに設定するとき、ロボットの角度と位置を設定します。 |
|
3 |
Servo On |
ロボットの各ジョイントを動かす駆動電源を供給します。 |
|
4 |
I/O |
コントローラーとフランジのデジタル、アナログ入出力状態を管理します。 |
|
5 |
I/O Test |
タスクで使っているコントローラーとフランジのデジタル、アナログ入出力装置に対する状態を確認し、テストを行います。 |
|
6 |
Modbus Test |
設定されているモドバス装置への信号をテストします。 |
|
7 |
Slave Monitoring |
産業用イーサネットスレーブ(PROFINET、EtherNet / IP、Modbus)が提供するすべてのスレーブ機能を監視します |
|
8 |
Job Space Status Value |
作業スペースの設定値の変更有無が確認できるように、登録されている全体の作業スペースデータを暗号化して表示します。 |
|
9 |
Safety Setup Status Value |
安全設定の設定値の変更有無が確認できるように、登録されている全体の安全データを暗号化して表示します。 |