Nastavují se zde bezpečnostní limity funkcí pro monitorování bezpečnosti.
-
Nastavení limitů a počáteční bezpečnosti se může lišit v závislosti na zařazení robota do procesu.
-
Bezpečnostní limity přestavují stav, kdy bezpečnostní monitorovací funkce spustí funkci zastavení. Když se zastavení dokončí, poloha robota a externí aplikovaná síla se může lišit od nastaveného bezpečnostního prahu.
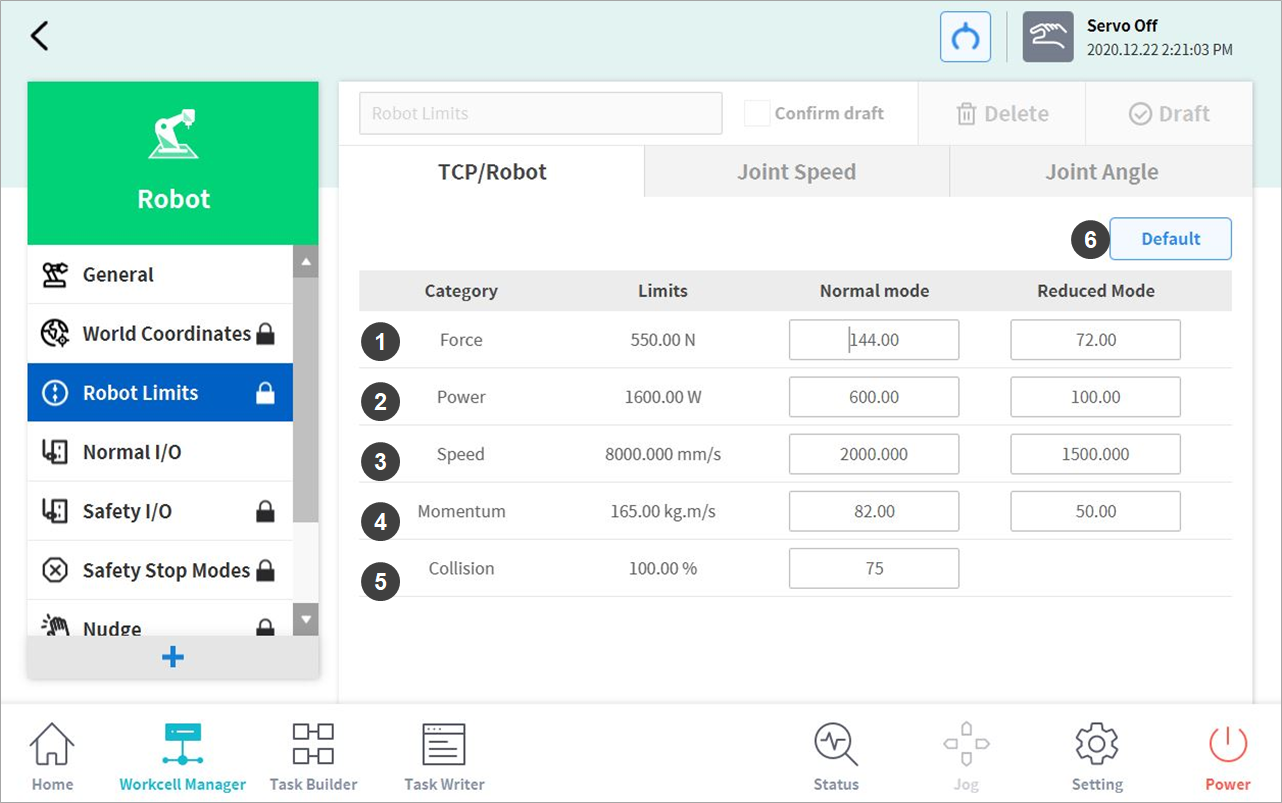
Limity TCP/robota
Pro nastavení limitů TCP/robota jděte na Robot Workcell a vyberte Robot > Limity robota > TCP/Robot. Rozvržení obrazovky pro nastavení Limitů TCP/robota je následující:
|
Č. |
Položka |
Popis |
|
1 |
Force (N) |
Může omezit úroveň síly aplikované na střed nástroje (TCP). |
|
2 |
Power (W) |
Může omezit úroveň mechanického výkonu robota. |
|
3 |
Speed (mm/s) |
Může omezit rychlost středu nástroje (TCP). |
|
4 |
Momentum (kg.m/s) |
Může omezit velikost hybnosti robota. |
|
5 |
Collision (%) |
Konfiguruje citlivost detekce kolize. |
|
6 |
Default Value |
Resetuje nastavení Limitů TCP/robota na výchozí hodnoty. |
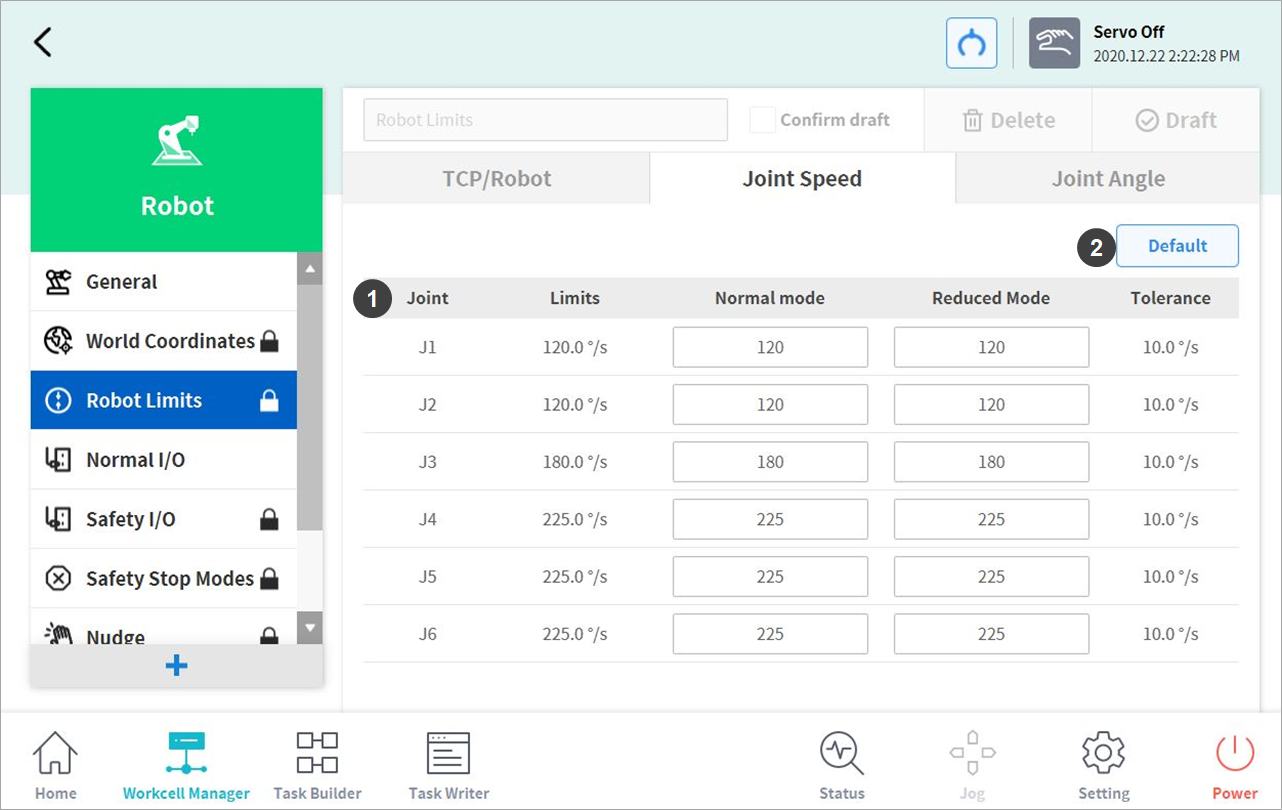
Limity rychlosti kloubu
Pro nastavení limitů rychlosti kloubu jděte na Robot Workcell a vyberte Robot > Limity robota > Rychlost kloubu. Rozvržení obrazovky pro nastavení Limitů rychlosti kloubu je následující:
|
Č. |
Položka |
Popis |
|
1 |
Joint Speed |
Může limitovat rychlost kloubu. (J4 nelze nastavit pro řadu P) |
|
2 |
Default Value |
Resetuje nastavení Limitů rychlosti kloubu na výchozí hodnoty. |
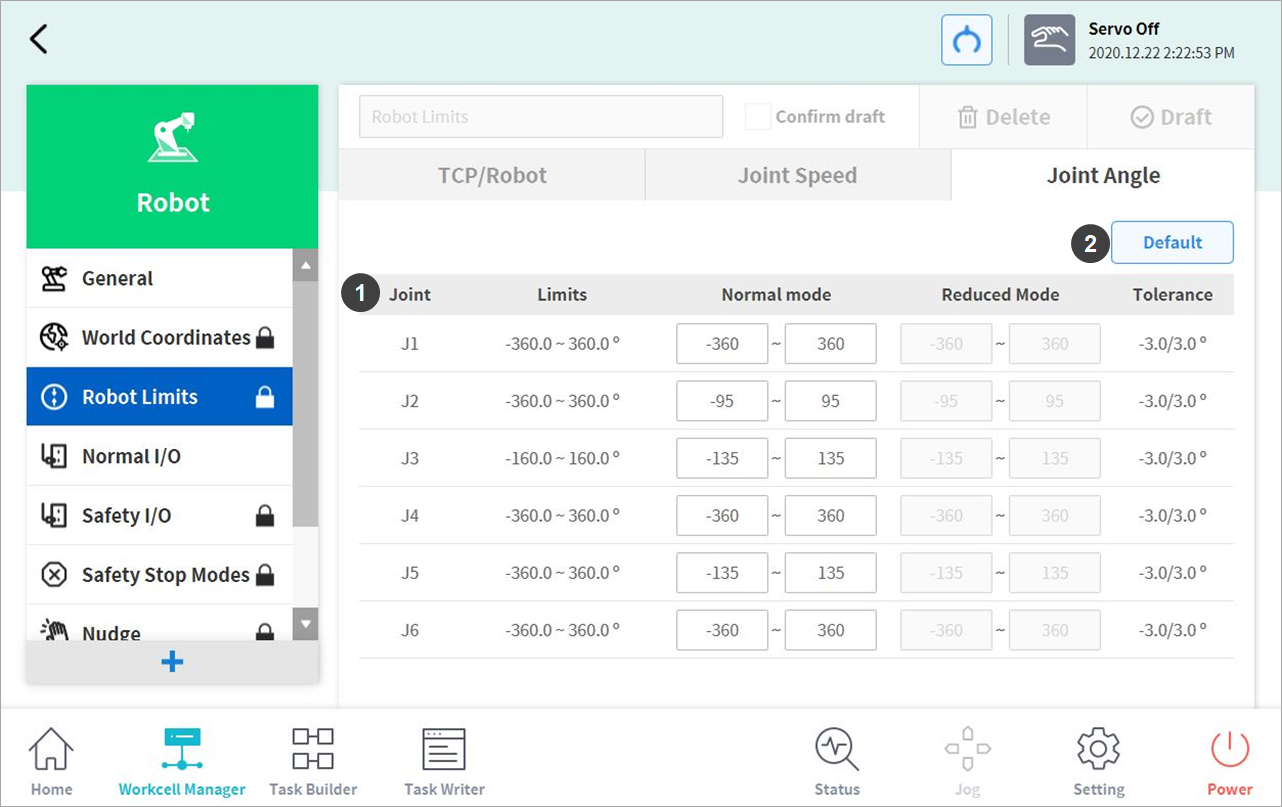
Limity úhlu kloubu
Pro nastavení limitů úhlu kloubu jděte na Robot Workcell a vyberte Robot > Limity robota > Úhel kloubu. Rozvržení obrazovky pro nastavení Limitů úhlu kloubu je následující:
|
Č. |
Položka |
Popis |
|
1 |
Angle Range of each Joint |
Může limitovat rozsah úhlů kloubu. (J4 nelze nastavit pro řadu P) |
|
2 |
Default Value |
Resetuje nastavení Limitů úhlu kloubu na výchozí hodnoty. |