Consente di impostare i limiti di sicurezza delle funzioni di monitoraggio sicurezza.
-
Il limite e le impostazioni di sicurezza iniziali possono variare a seconda della linea del robot.
-
I limiti di sicurezza rappresentano la condizione in cui la funzione di monitoraggio sicurezza attiva la funzione di arresto. Quando l'arresto è completo, la posizione del robot e la forza applicata dall'esterno possono essere diverse dalla soglia di sicurezza configurata.
TCP/Robot Limits (Limiti TCP/Robot)
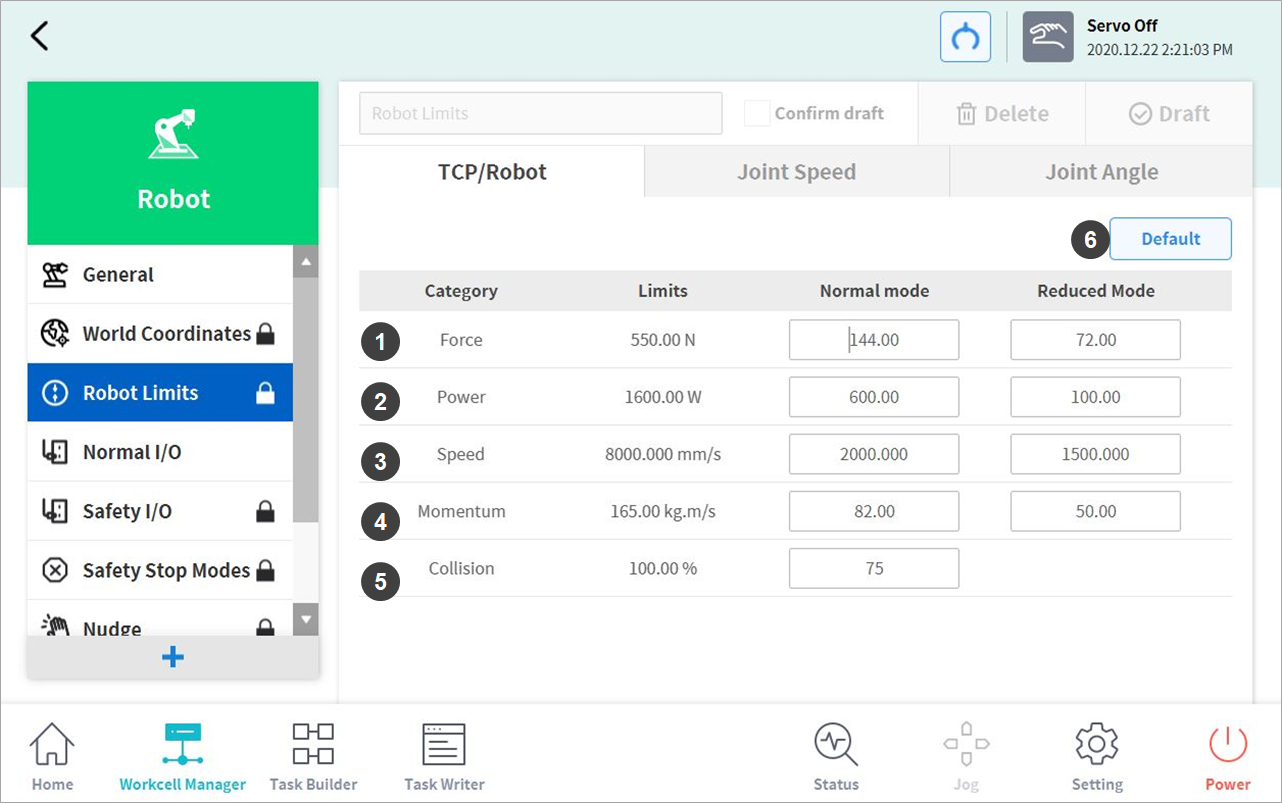
Per impostare i limiti TCP/Robot, andare alla Workcell Robot e selezionare Robot>Robot Limits > TCP/Robot (Robot > Limiti robot > TCP/Robot). La schermata di impostazione TCP/Robot Limits si presenta come segue:
|
N. |
Voce |
Descrizione |
|
1 |
Force (N) |
Consente di limitare il livello della forza applicata al baricentro utensile (TCP). |
|
2 |
Power (W) |
Consente di limitare il livello della potenza meccanica del robot. |
|
3 |
Speed (mm/s) |
Consente di limitare la velocità del baricentro utensile (TCP). |
|
4 |
Momentum (kg.m/s) |
Consente di limitare il momento del robot. |
|
5 |
Collision (%) |
Configura la sensibilità di rilevamento collisione. |
|
6 |
Default Value |
Ripristina le impostazioni TCP/Robot Limits ai valori predefiniti. |
Joint Speed Limits (Limiti velocità giunto)
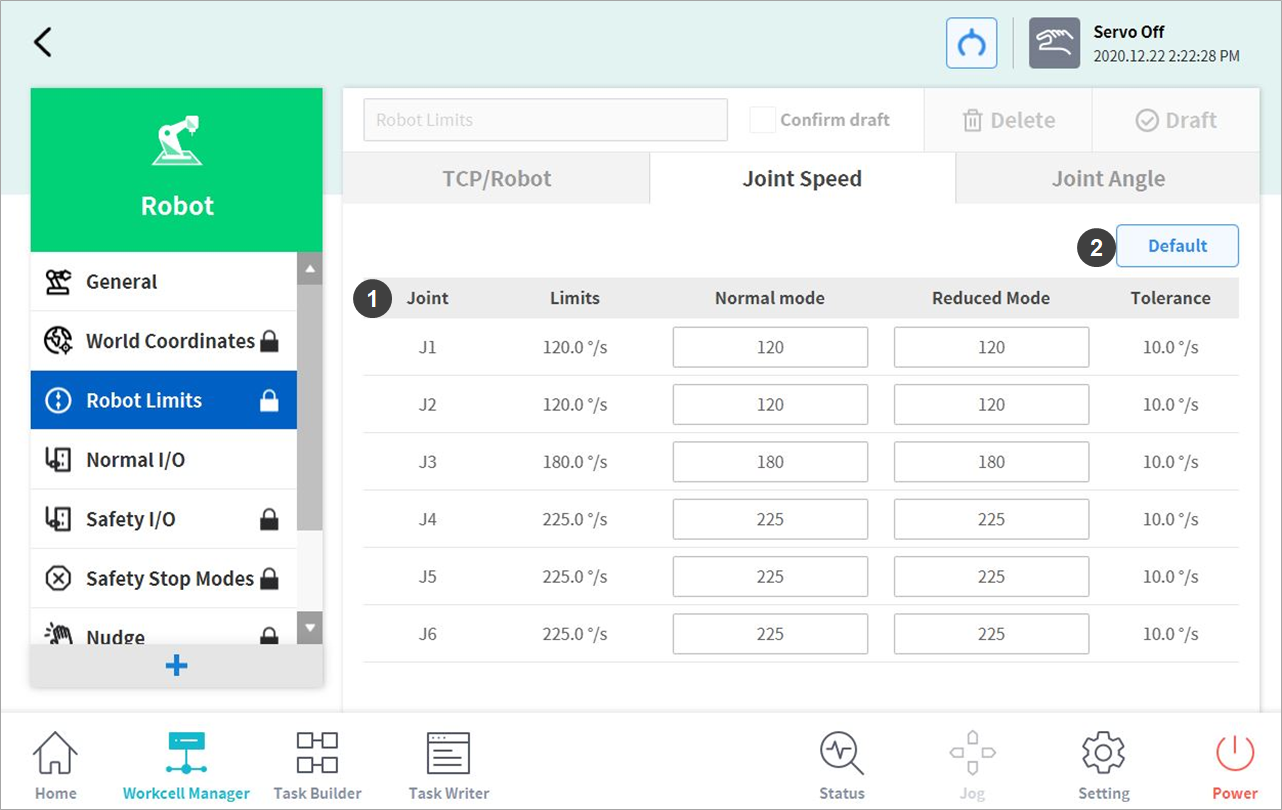
Per impostare i limiti di velocità giunto, andare alla Workcell Robot e selezionare Robot>Robot Limits > Joint Speed (Robot > Limiti robot > Velocità giunto). La schermata di impostazione Joint Speed Limits (Limiti velocità giunto) si presenta come segue:
|
N. |
Voce |
Descrizione |
|
1 |
Joint Speed |
Consente di limitare la velocità di ciascun giunto. (J4 non può essere impostato per la serie P) |
|
2 |
Default Value |
Ripristina le impostazioni Joint Speed Limits (Limiti velocità giunto) ai valori predefiniti. |
Joint Angle Limits (Limiti angolo giunto)
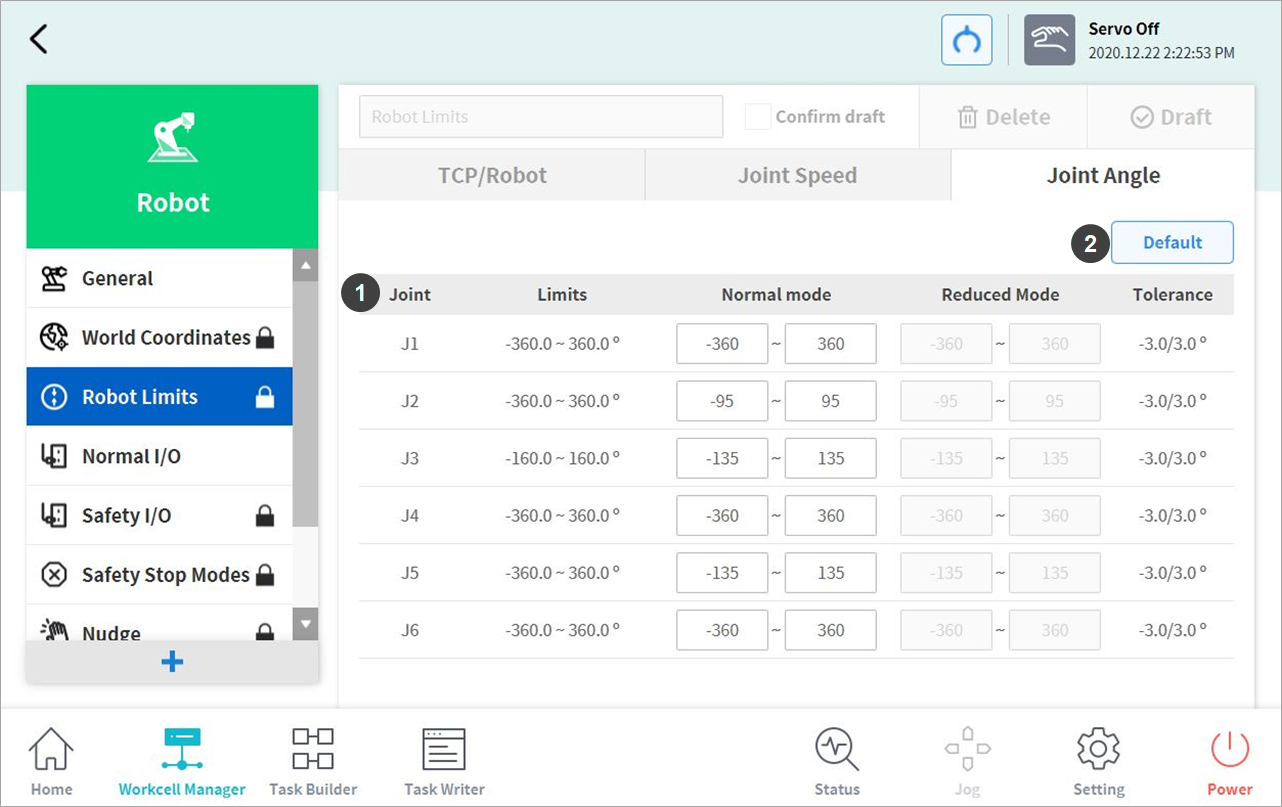
Per impostare i limiti di angolo giunto, andare alla Workcell Robot e selezionare Robot>Robot Limits > Joint Angle (Robot > Limiti robot > Angolo giunto). La schermata di impostazione Joint Speed Limits (Limiti velocità giunto) si presenta come segue:
|
N. |
Voce |
Descrizione |
|
1 |
Angle Range of each Joint |
Consente di limitare il campo di angolazione di ciascun giunto. (J4 non può essere impostato per la serie P) |
|
2 |
Default Value |
Ripristina le impostazioni Joint Angle Limits (Limiti angolo giunto) ai valori predefiniti. |