Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Training Video
V3 Manual
2.12.1
2.12
2.11.0.1
2.10.3
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
2.12.1
2.12
2.11.0.1
2.10.3
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Training Video
V3 Manual
Main
용접기능을 활용한 협동로봇 아크용접
아크용접 개요
EtherNet/IP 인터페이스 방식 용접기 연결 예시
사전 준비 사항
표준 PLC의 네트워크 구성도
XG5000을 이용한 Gateway 프로젝트 불러오기
디지털 용접기의 송/수신 크기 수정하기
PLC, 로봇, 용접기 EtherNet/IP 환경구축하기
Program Check
프로젝트 다운로드 및 Run
Analog 인터페이스 방식 용접기 연결 예시
워크셀 매니저 사용하기
워크셀 매니저에서 설정하기(WCI)
프로그래밍하기(TB/TW)
실행하며 모니터링/조정하기(Play)
워크셀 매니저에서 설정하기(WCI)(Analog)
프로그래밍 하기(TB/TW)(Analog)
실행하며 모니터링/조정하기(Play)(Analog)
아크 센싱(Arc Sensing)
Programming 명령어
Breadcrumbs
Home
Welding Technical Note(V2.12.1)
용접기능을 활용한 협동로봇 아크용접
EtherNet/IP 인터페이스 방식 용접기 연결 예시
On this Page
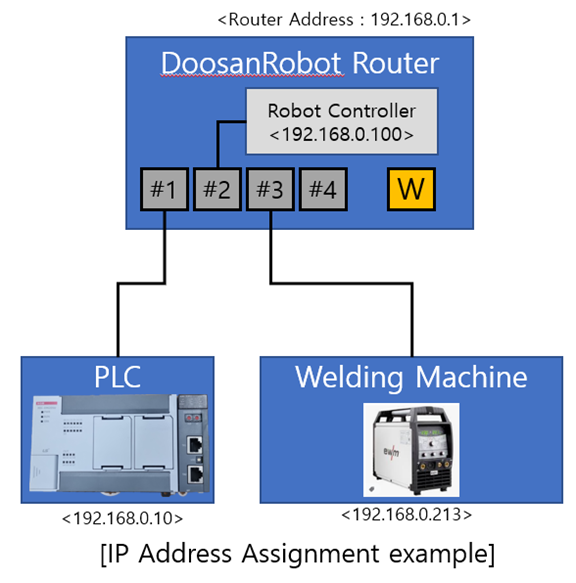
표준 PLC의 네트워크 구성도
표준 네트워크의 경우 제어기내에 장착되어 있는 Router를 중심으로 아래 그림과 같이 구성됩니다.