要使机器人移动特定角度,请执行以下步骤:
-
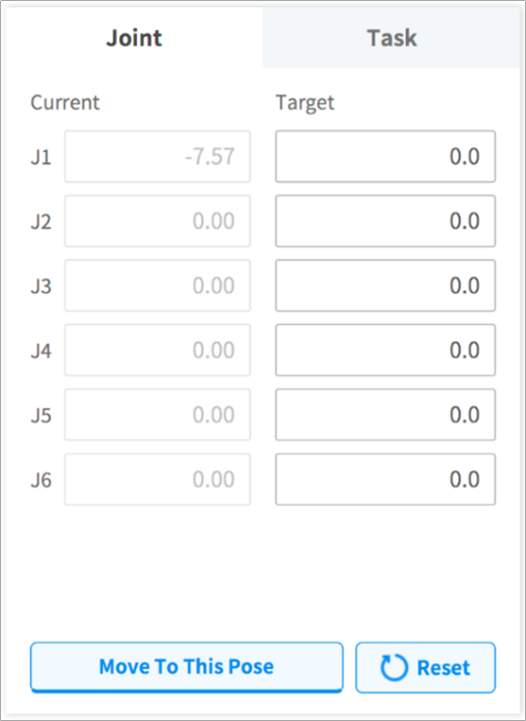
选择 Move(移动)选项卡,然后选择 Joint(关节)选项卡。
-
输入机器人关节的目标角度。
-
启用实时模式。

-
点击并按住 Move to Corresponding Pose(移至对应位姿)按钮以调整机器人关节角度。
要使机器人移动特定角度,请执行以下步骤:
选择 Move(移动)选项卡,然后选择 Joint(关节)选项卡。
输入机器人关节的目标角度。
启用实时模式。
点击并按住 Move to Corresponding Pose(移至对应位姿)按钮以调整机器人关节角度。