要基于世界坐标移动机器人,请执行以下步骤:
-
选择 Move(移动)选项卡,然后选择 Task(任务)选项卡。
-
选择 World(世界)作为显示坐标,然后选择 World(世界)选项卡。
-
配置参考世界坐标移动时的位姿。
-
点击并按住“Move to Corresponding Pose”(移至对应位姿)按钮,转至设定的坐标。
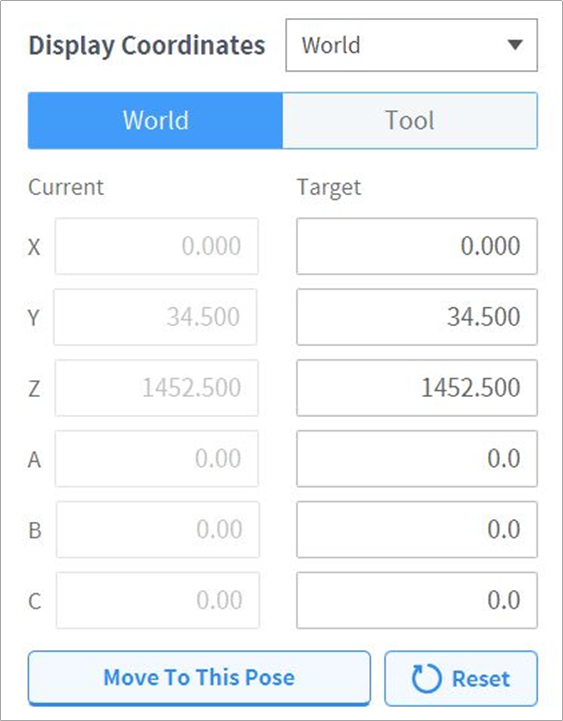
要基于世界坐标移动机器人,请执行以下步骤:
选择 Move(移动)选项卡,然后选择 Task(任务)选项卡。
选择 World(世界)作为显示坐标,然后选择 World(世界)选项卡。
配置参考世界坐标移动时的位姿。
点击并按住“Move to Corresponding Pose”(移至对应位姿)按钮,转至设定的坐标。