ロボットのジョイントを基準として角度を調節するには:
-
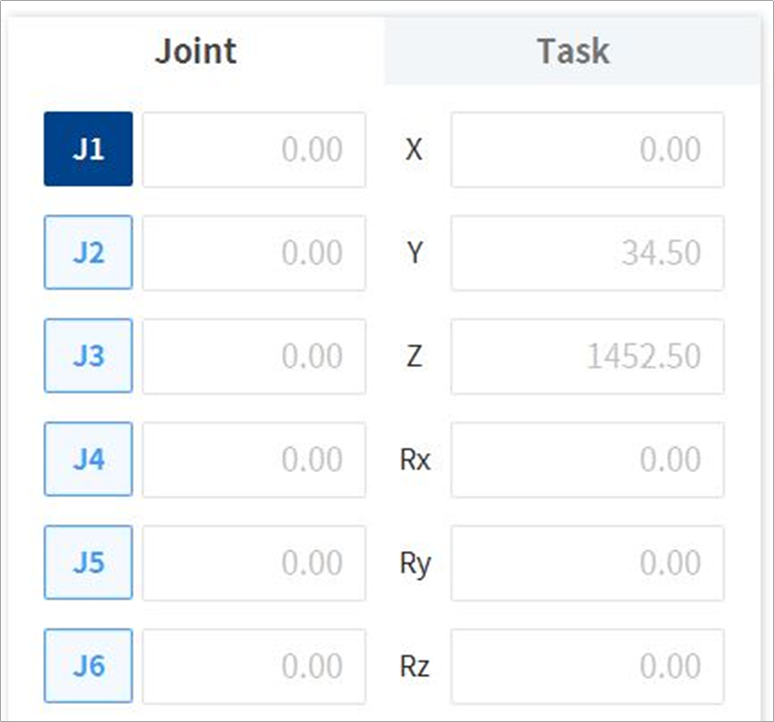
Jog画面でJointタブを選択してください。
-
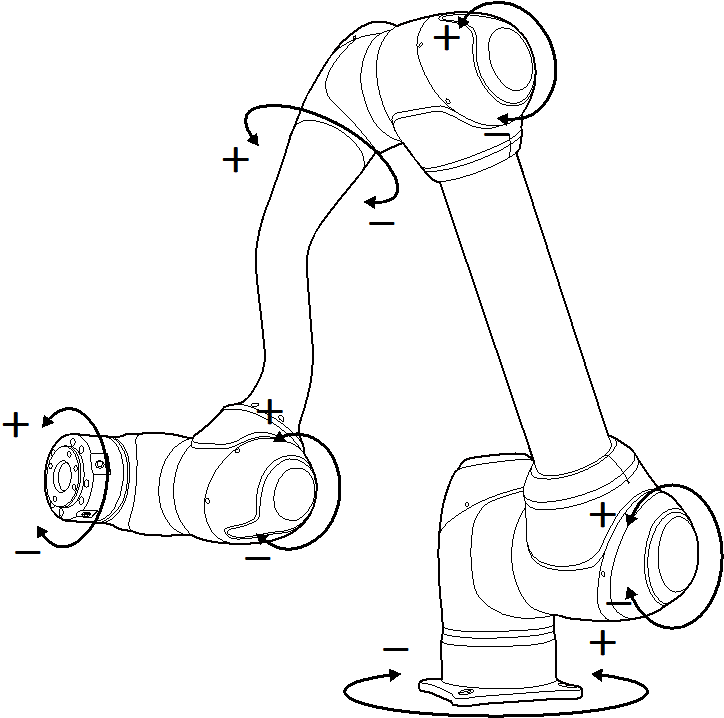
角度を調節する軸(J1~J6)を選択してください。
-
方向ボタン(


メモ
安全地域はバーチャルモードでは適用されません。
ロボットのジョイントを基準として角度を調節するには:
Jog画面でJointタブを選択してください。
角度を調節する軸(J1~J6)を選択してください。
方向ボタン(
安全地域はバーチャルモードでは適用されません。