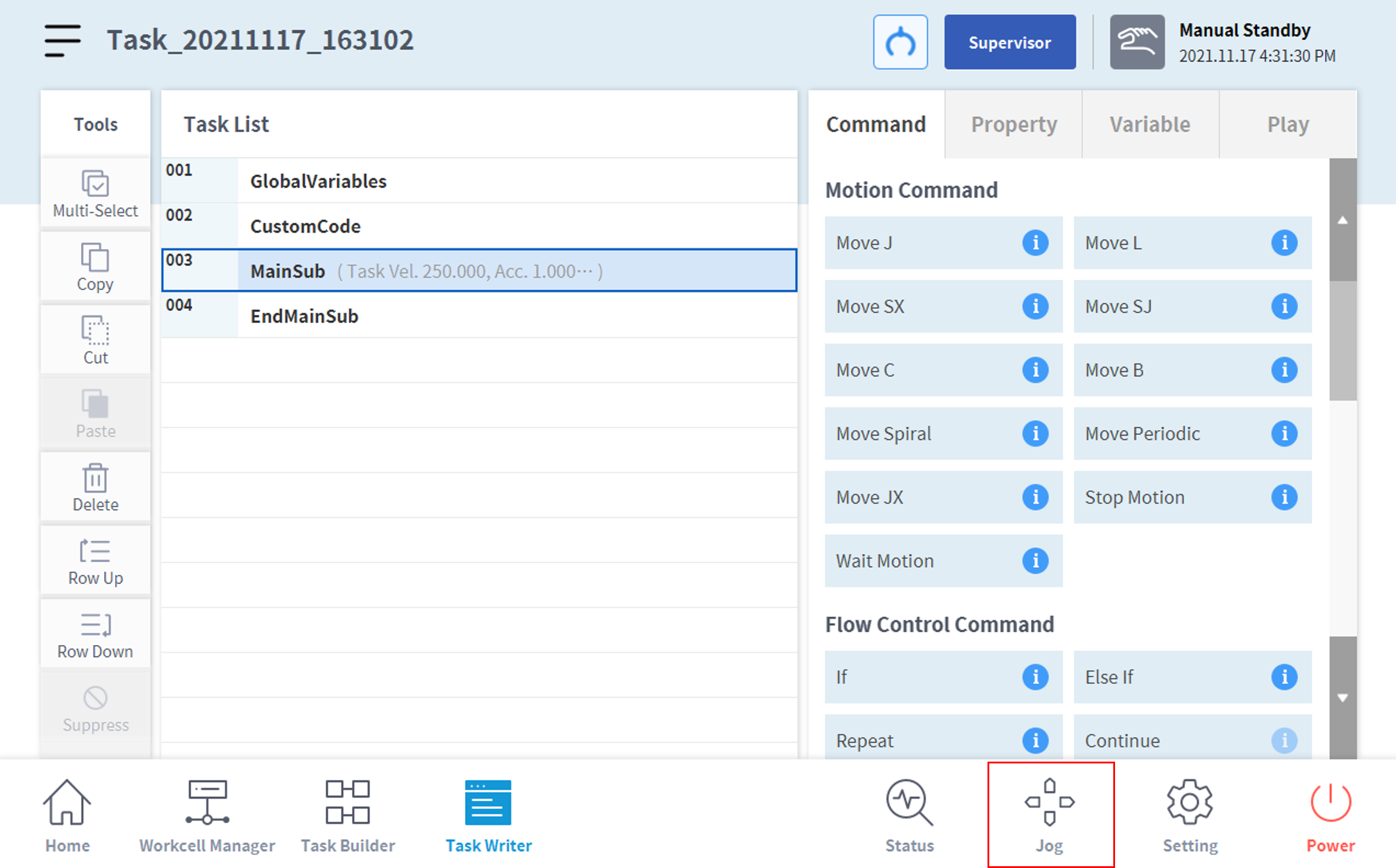
ジョグプラス(Jog+)を使うと他の作業をしながら、同時にジョグ機能を使用することができます。 ロボットのティーチング時に目標を達成するまで、微細な手動移動操縦が必要な場合に活用することができます。
ジョグプラスは、次のような方法で活性化させることができます。
-
画面下のメインメニューからジョグボタンを1秒以上押してください。
-
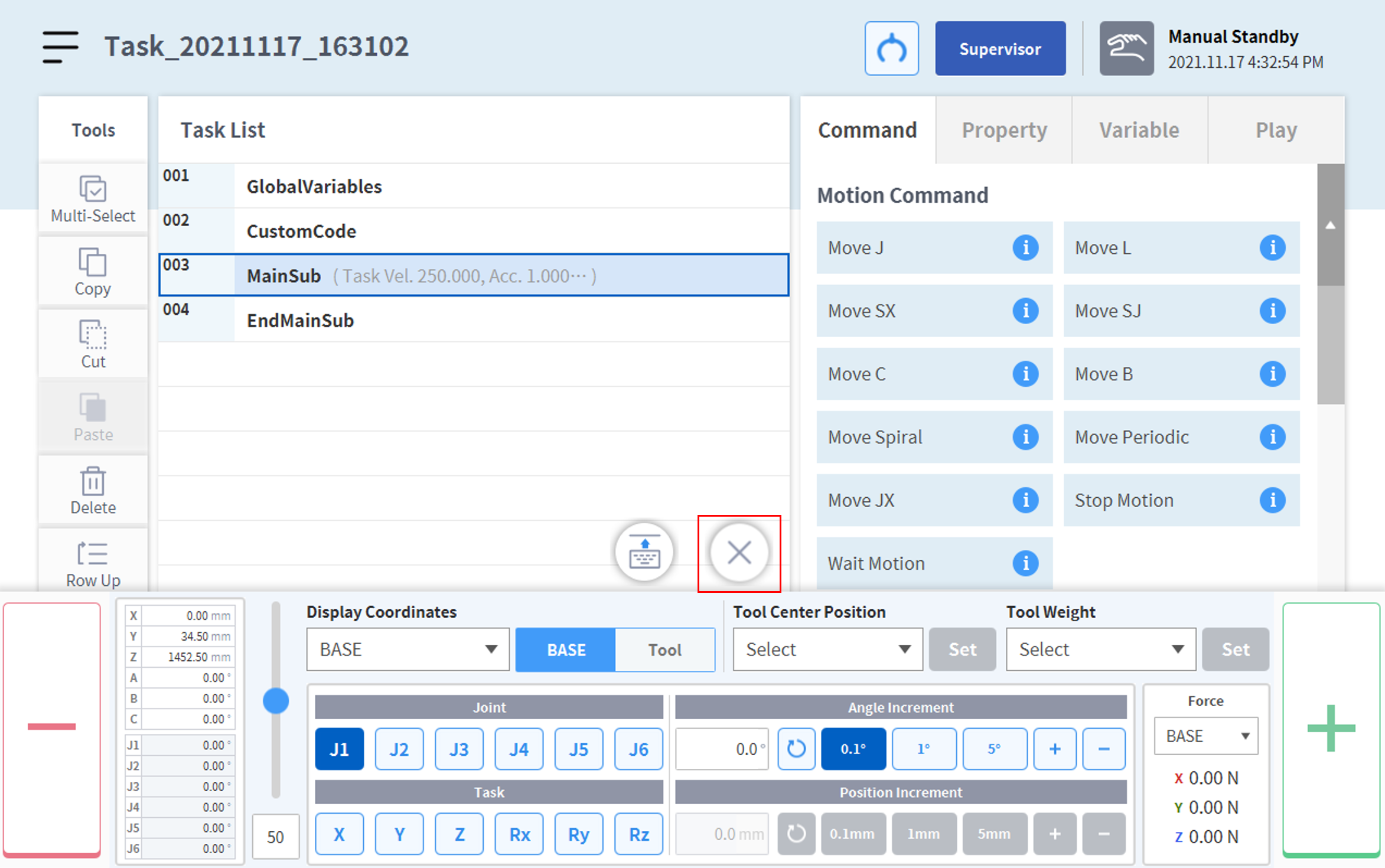
ジョグプラス画面がアクティブになります。
-
ジョグプラスは「X」ボタンを押して無効にすることができます。
|
番号 |
項目 |
説明 |
|---|---|---|
|
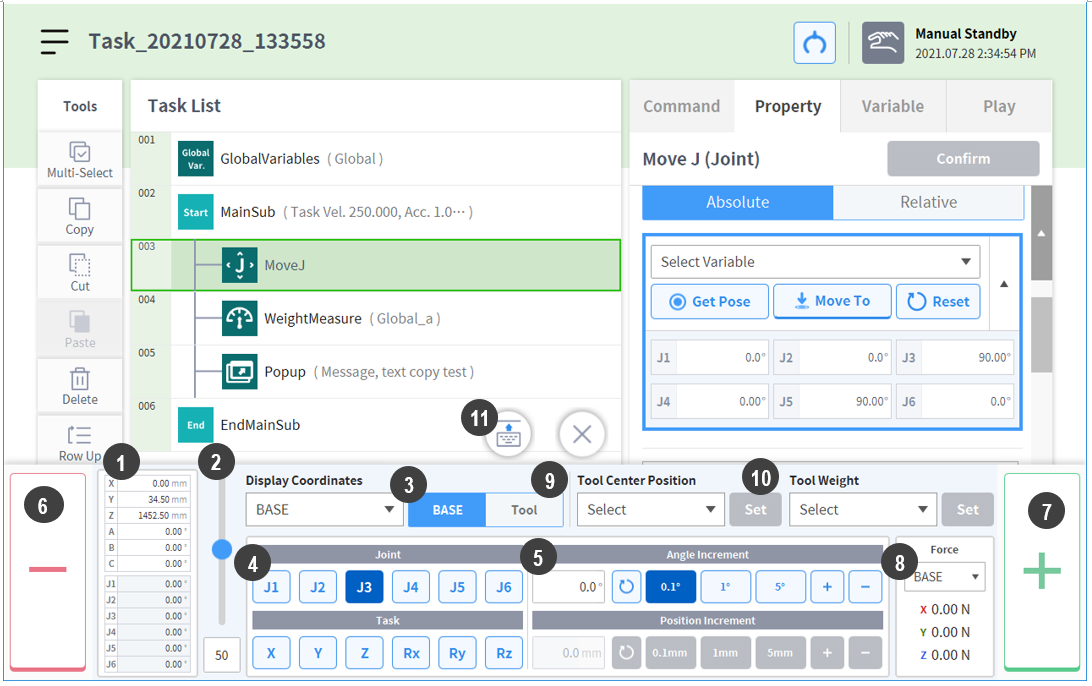
1 |
現在のロボットのポーズ |
設定されたDisplay Coordinates基準でロボットのポーズを表示します。 |
|
2 |
手動モード速度 |
手動モードでのロボット移動速度を設定します。スライダーポイントをドラッグして速度を調節できます。 スライダーポイントが100%であれば、ジョグタブでは対応するジョイントの最高速度は30 deg/sで、タスクの最高速度は250 mm/sです。この速度はジョグ及び移動ボタンでロボットを操作する速度にのみ影響を与えます。 |
|
3 |
基準点設定 |
タスク座標系を整列する基準点を設定します。 ベース: ロボットベースを基準にタスク座標を設定します。 ワールド: 設定したワールド座標系を基準としてタスク座標を設定します。 ツール: ロボットの6軸末端のツールを基準にタスク座標を設定します。 |
|
4 |
軸選択 |
移動する軸を選択します。 ジョイントタブ: J1~J6のうち一つの軸を選択します。 タスクタブ: X~Rzのうち一つの軸を選択します。 |
|
5 |
Increment選択 |
選択した軸をどのくらい移動させるのか数値を入力します。 |
|
6 |
Move - ボタン |
ボタンを押し続けると選択した軸をIncrementの位置だけ-方向に移動させます。 |
|
7 |
Move + ボタン |
ボタンを押し続けると選択した軸をIncrementの位置だけ+方向に移動させます。 |
|
8 |
Forceモニタリング |
選択した座標系を基準として発生する外力を表示します。 |
|
9 |
TCP設定 |
TCPを設定します。 |
|
10 |
Tool Weight設定 |
Tool Weightを設定します。 |
|
11 |
Jog+の位置変更 |
Jog+の位置を画面の上段又は下段に移動させます。 |