Landmark Skill은 Landmark의 원점 자세를 반환하는 기능과 원점으로부터 Offset 된 자세를 반환해주는 스킬입니다. 반환 되는 로봇 자세를 이용해 여러가지 작업이 가능합니다. Landmark로부터 Offset 만큼 떨어져 있는 물체 자세로 이동이 가능합니다. 또는 고정된 Landmark 자세를 이용해 자세보정이 가능합니다. Landmark 스킬을 마음껏 활용하기 바랍니다.
Landmark Skill의 Offset 자세를 활용하기 위해서는 DART-Vision Calibration Tab에 있는 Hand-Eye Calibration, Auto Calibration을 진행하고 Calibration Data를 SVM에 저장한 후 사용해야 합니다. Calibration을 진행하지 않았다면 DART-Vision 매뉴얼을 보고 Calibration을 진행하십시오.
-
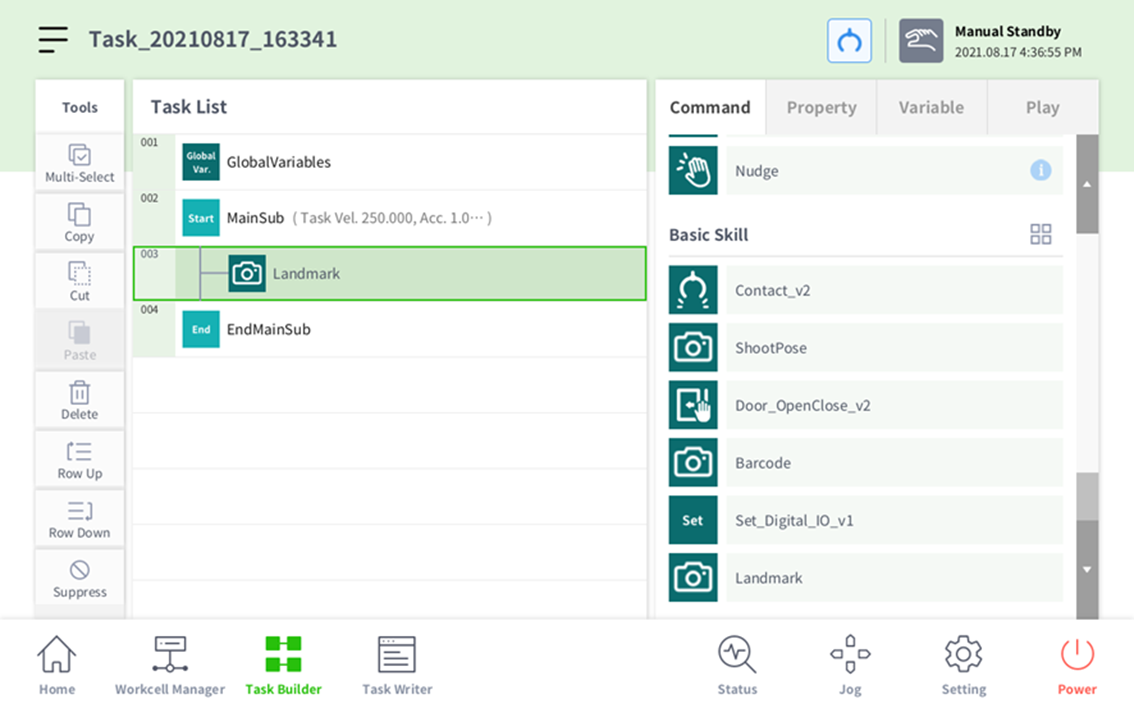
Command Tab에서 Landmark 버튼을 클릭해 Landmark Skill을 추가합니다.
-
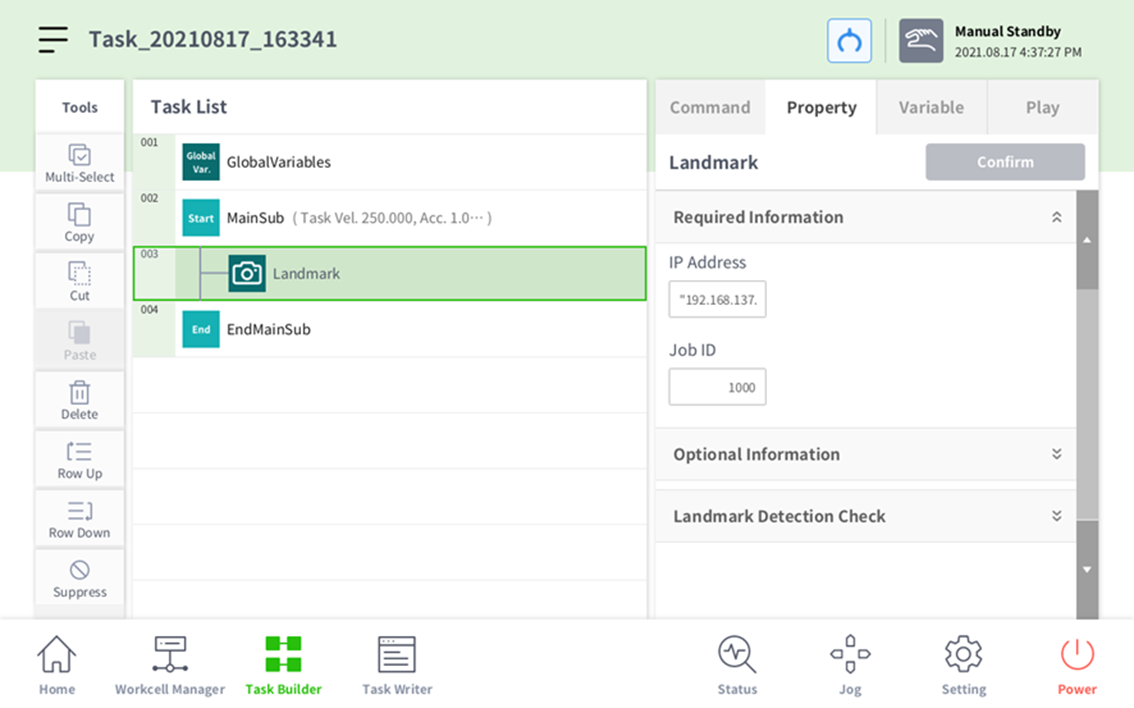
Property Tab에서 Required Information을 Open하고 IP Address와 Job ID를 입력한다.
-
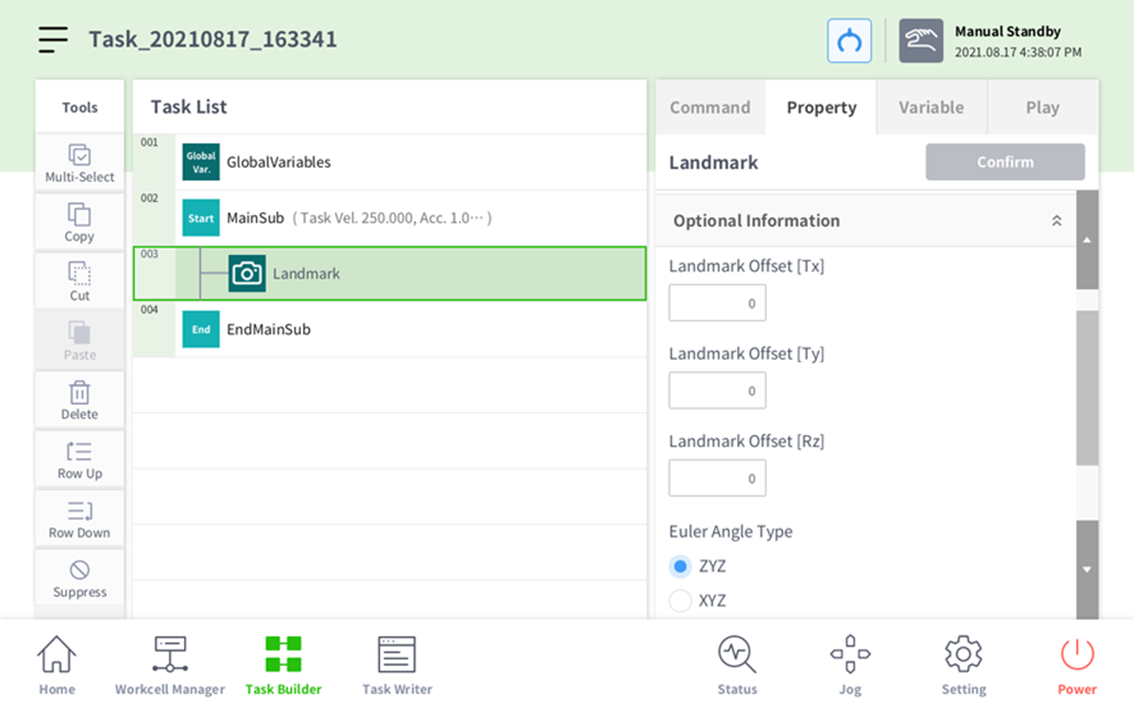
Optional Information을 열어 Landmark 원점으로부터 Offset 이동할 값을 입력합니다.
-
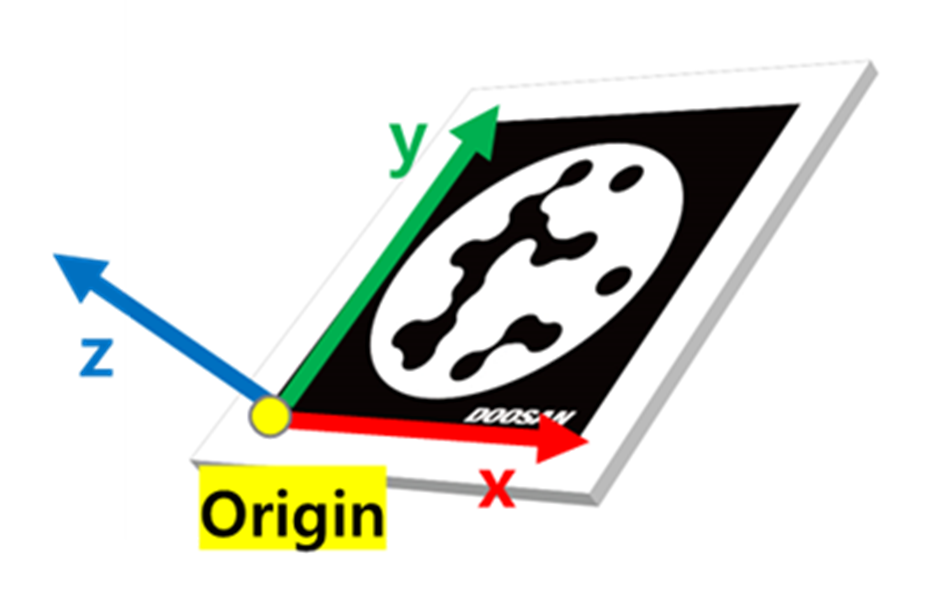
두산로보틱스의 방향 Euler Angle Type은 Euler ZYZ입니다. 기본값인 Euler ZYZ를 선택하면 MoveL, MoveB 등에 사용하는 Posx 형태에 바로 활용이 가능합니다.
-
옵션에서 Euler XYZ로 변환하여 출력하여 좌표를 활용하고자하면 좌표계 변환 계산이 추가로 필요합니다.
-
-
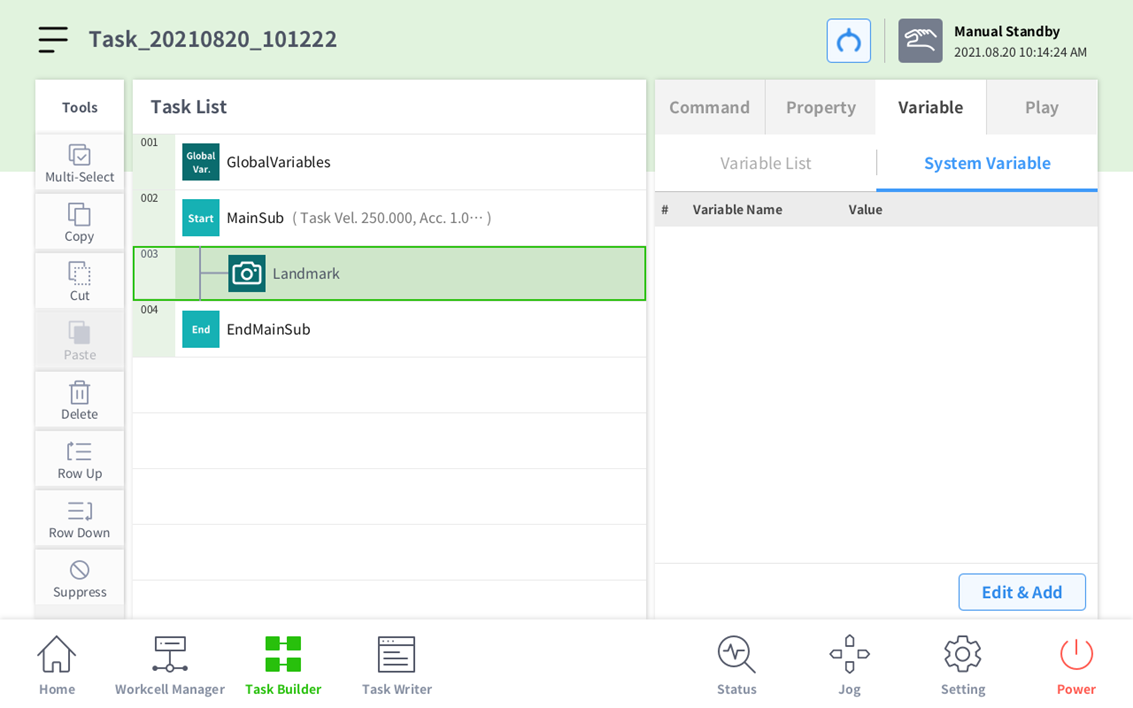
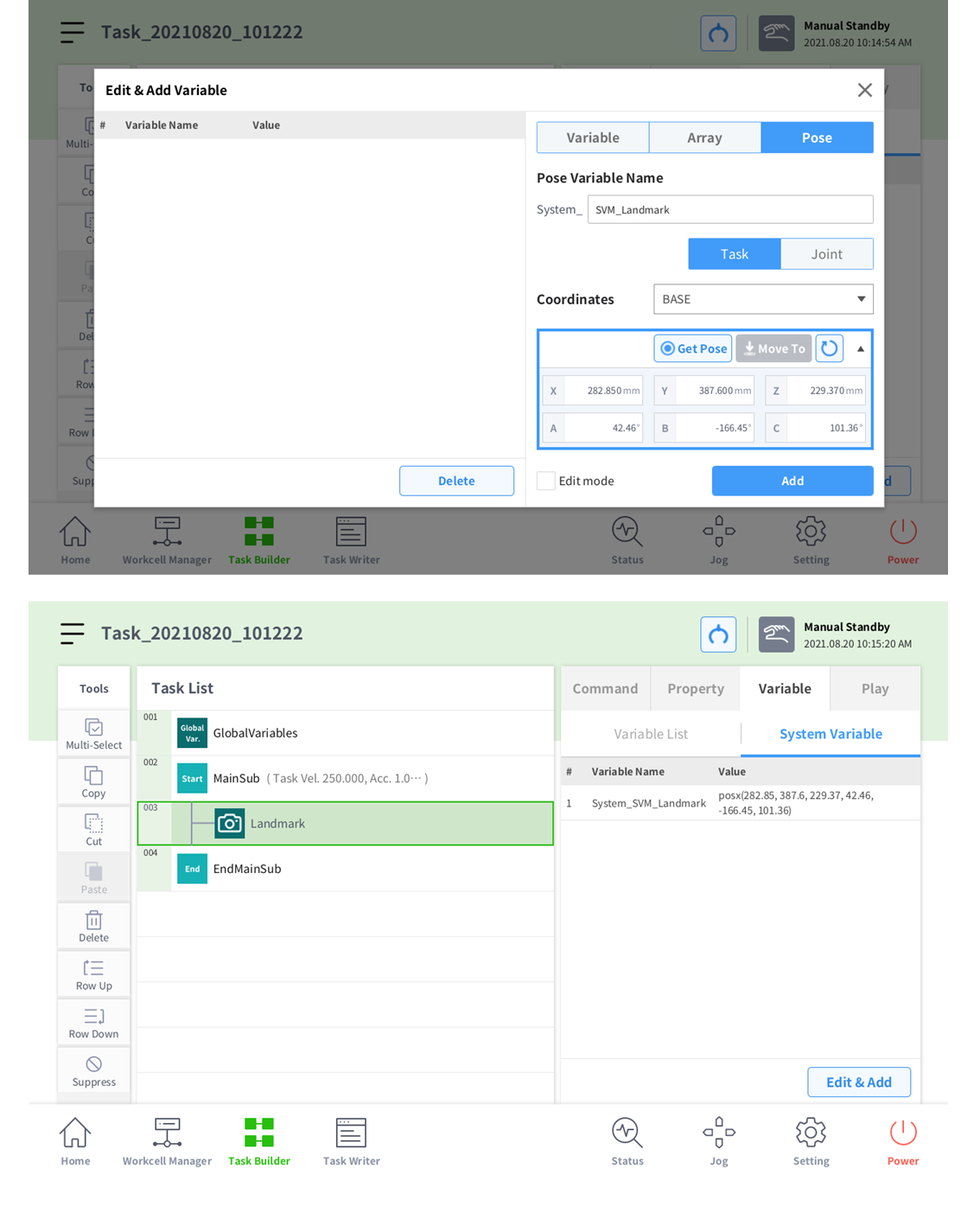
Variable Tab에서 Edit & Add 버튼을 누릅니다.
-
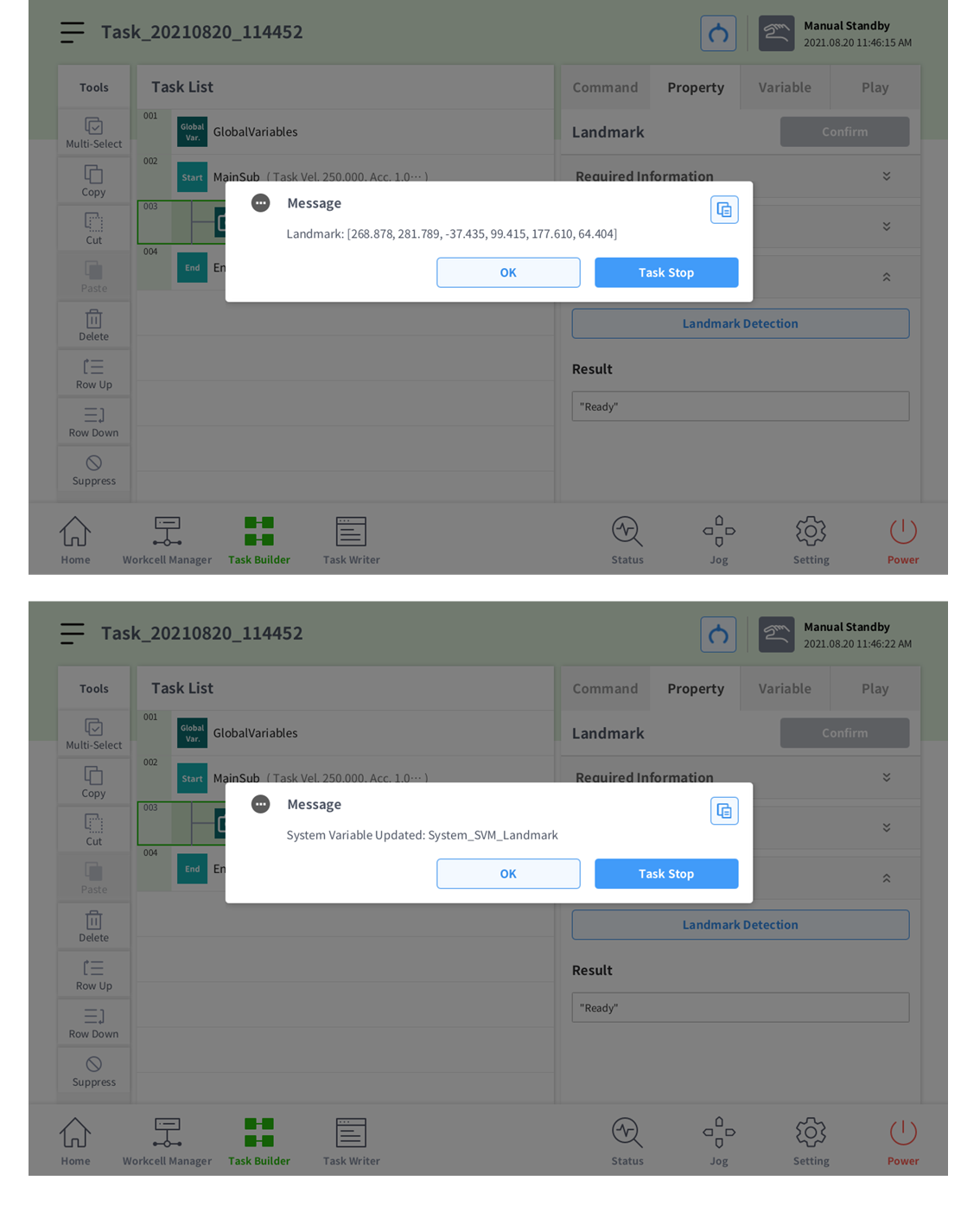
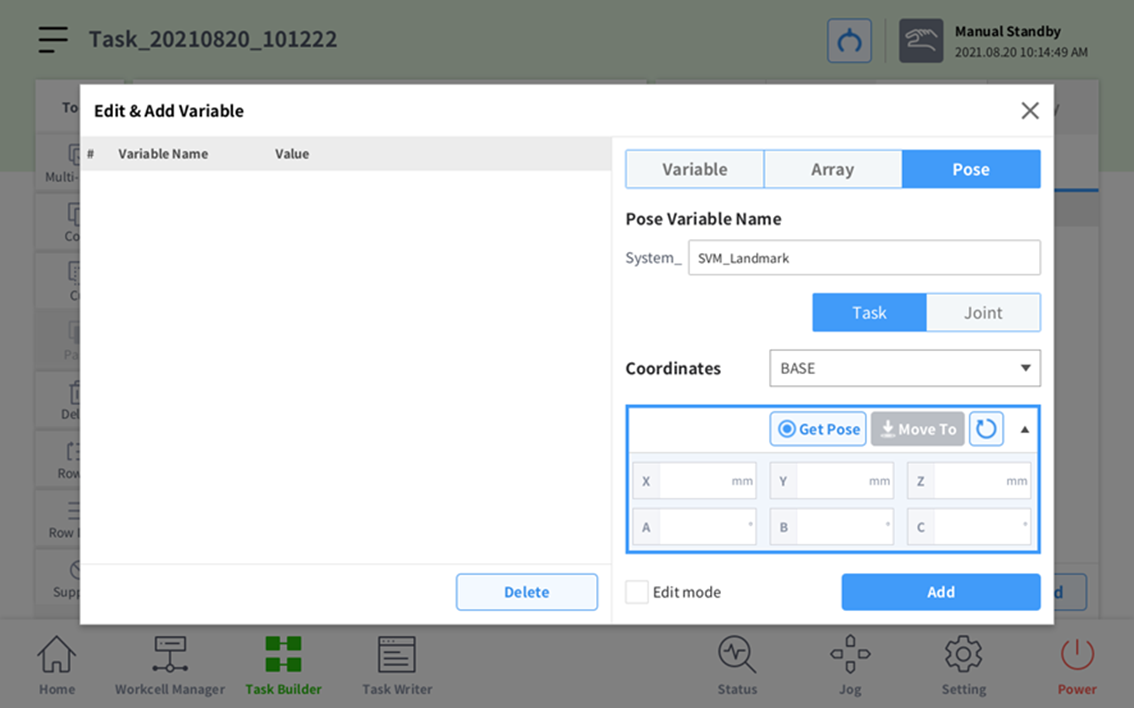
System_SVM_Landmark를 추가합니다.
-
Get Pose를 누릅니다. Add 버튼을 누르면 Variable이 추가됩니다.
-
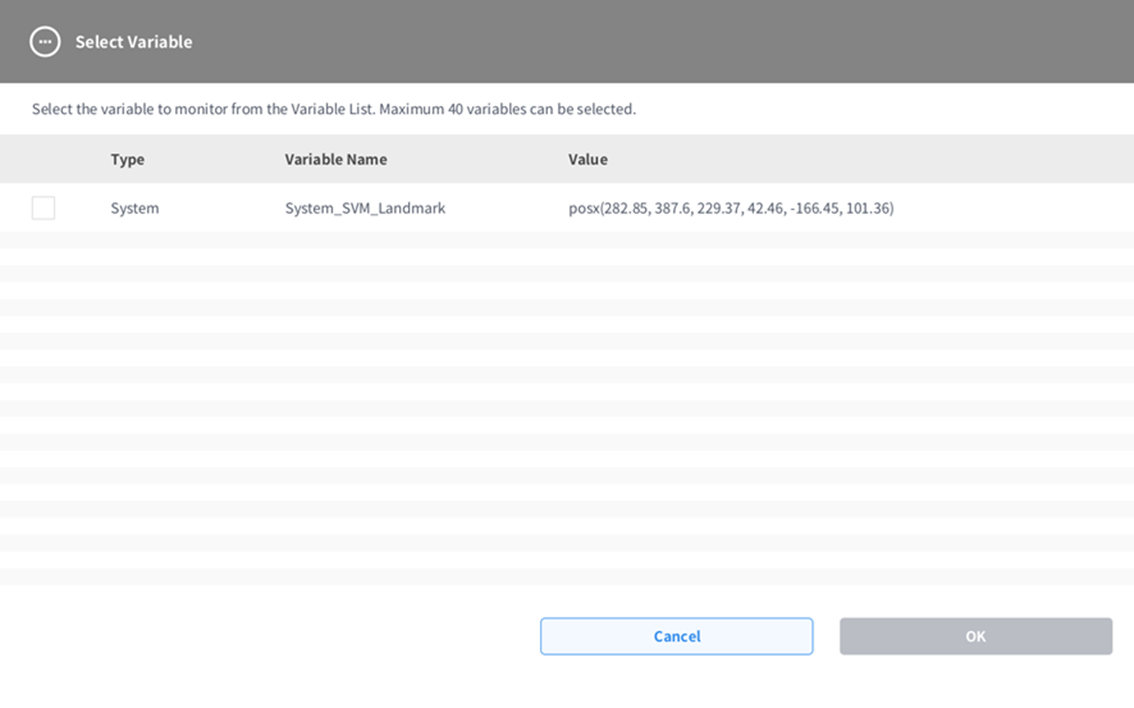
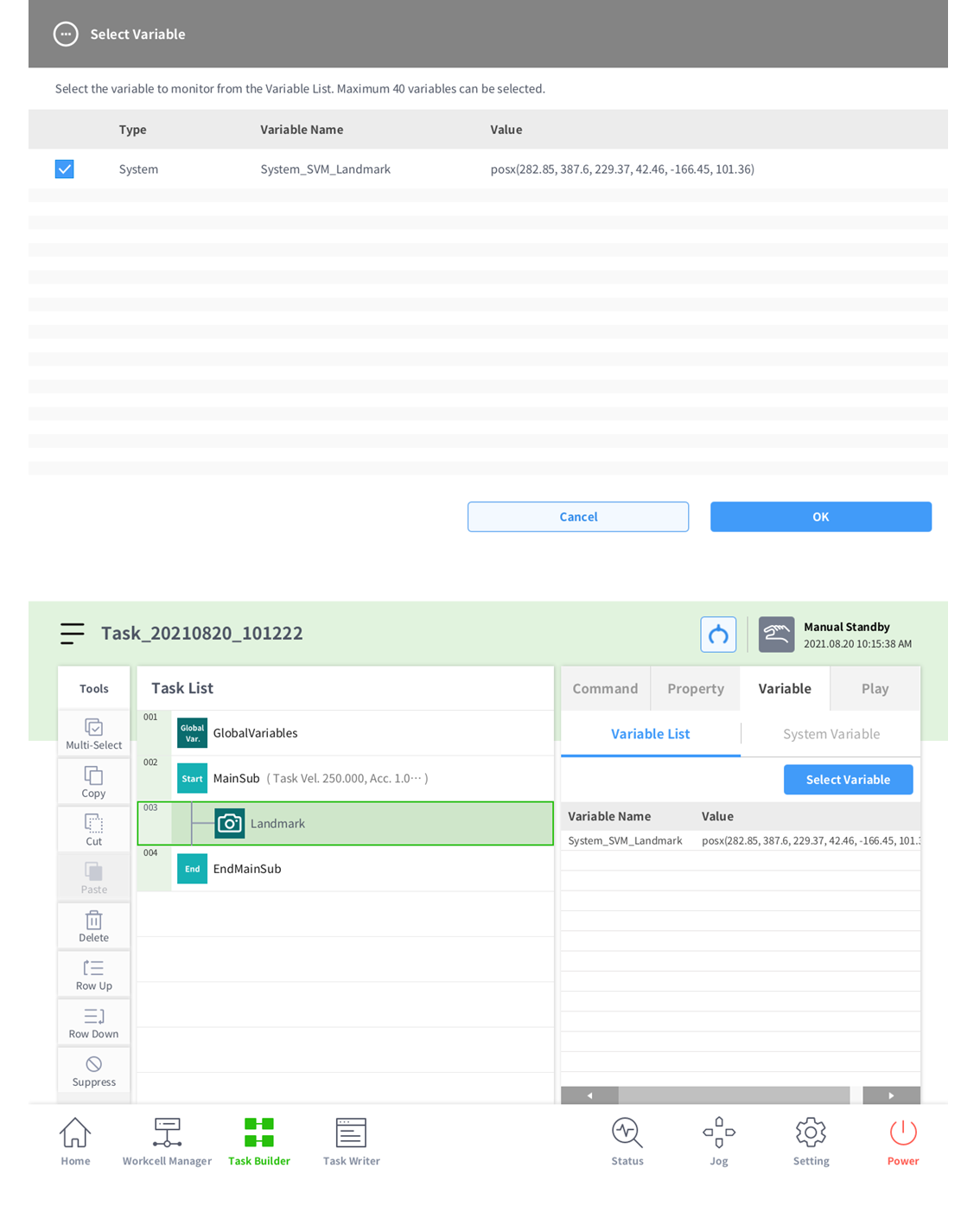
창을 종료하고 Variable List 버튼을 누른 뒤 Select Variable 버튼을 누릅니다.
-
System_SVM_Landmark 체크 버튼을 클릭한 뒤 확인을 누르면 Variable선택이 됩니다.
-
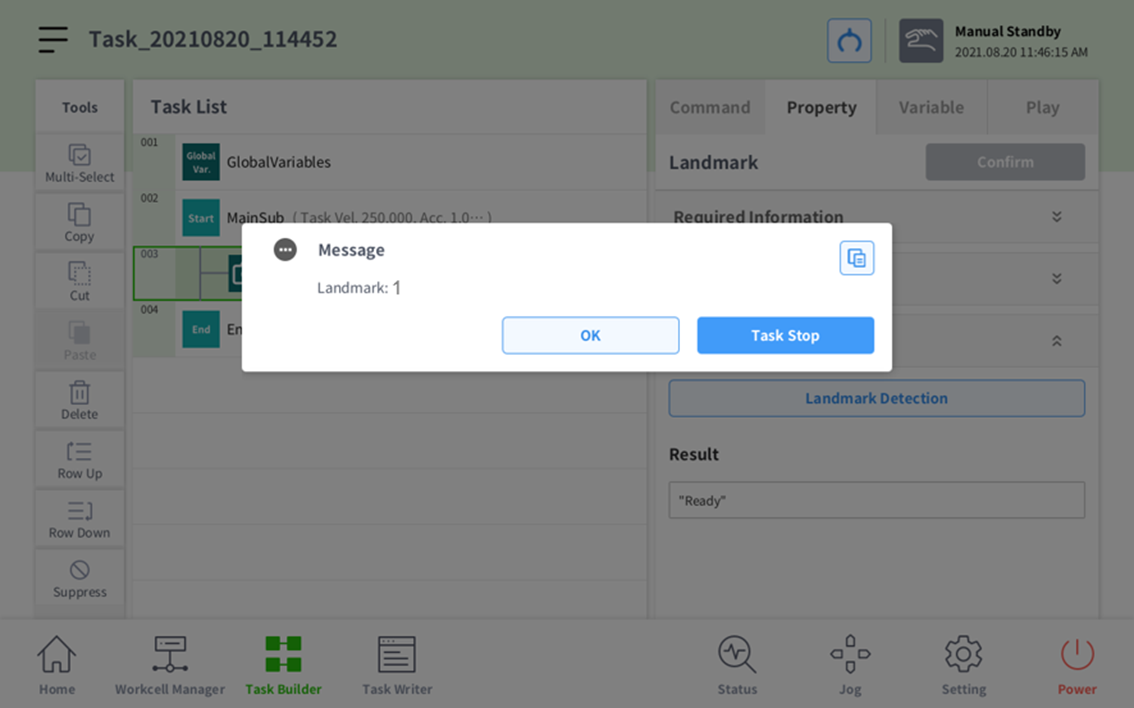
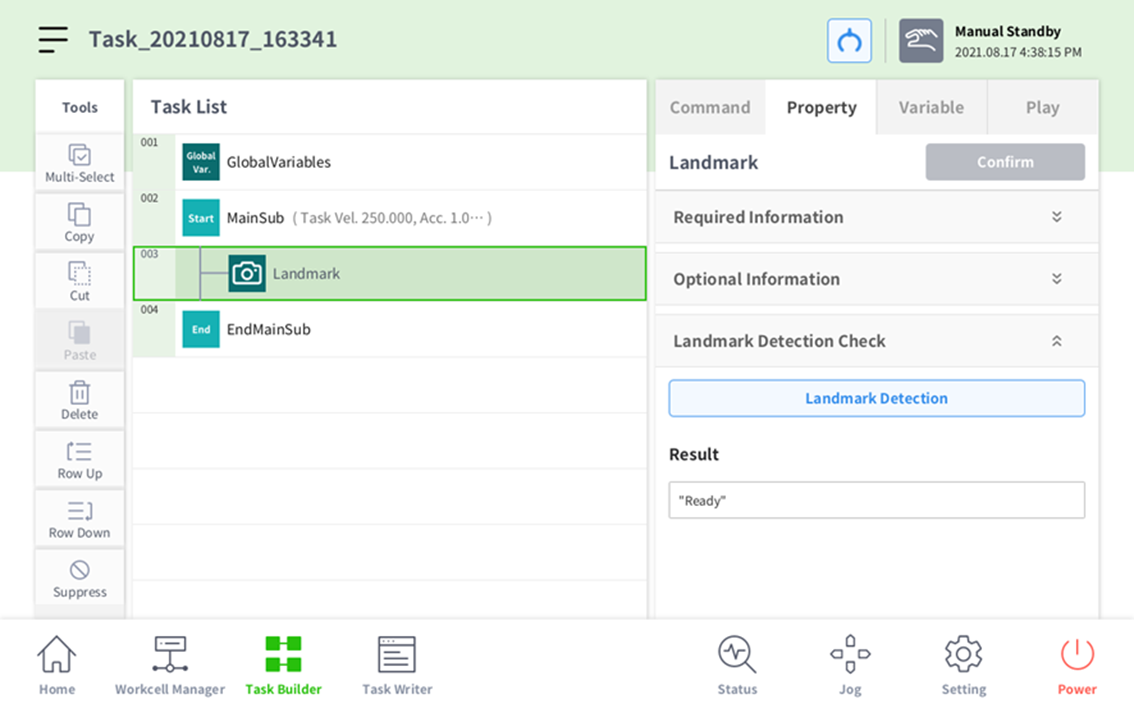
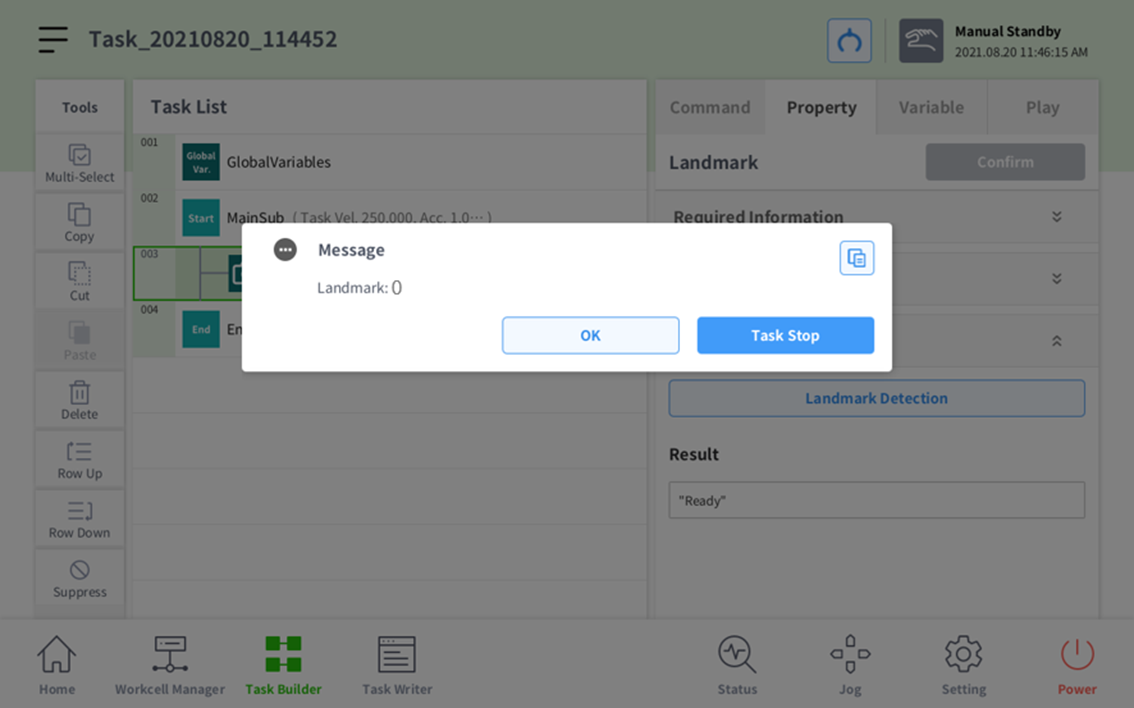
Landmark Detection 버튼을 이용해 값이 정상으로 들어오는지 확인합니다.
-
Landmark 미검출 시
-
Landmark 검출 시