ShootPose Skill은 DART-Vision으로 설정한 촬영 높이의 로봇 자세를 반환해주는 Skill로 반환 되는 로봇 자세를 이용해 로봇을 촬영 위치로 이동할 수 있습니다.
ShootPose Skill은 DART-Vision Calibration Tab에 있는 Hand-Eye Calibration 또는 Auto Calibration을 진행하고 Calibration Data를 SVM에 저장한 후 사용해야 합니다. Calibration을 진행하지 않았다면 DART-Vision 매뉴얼을 보고 Calibration을 진행하십시오.
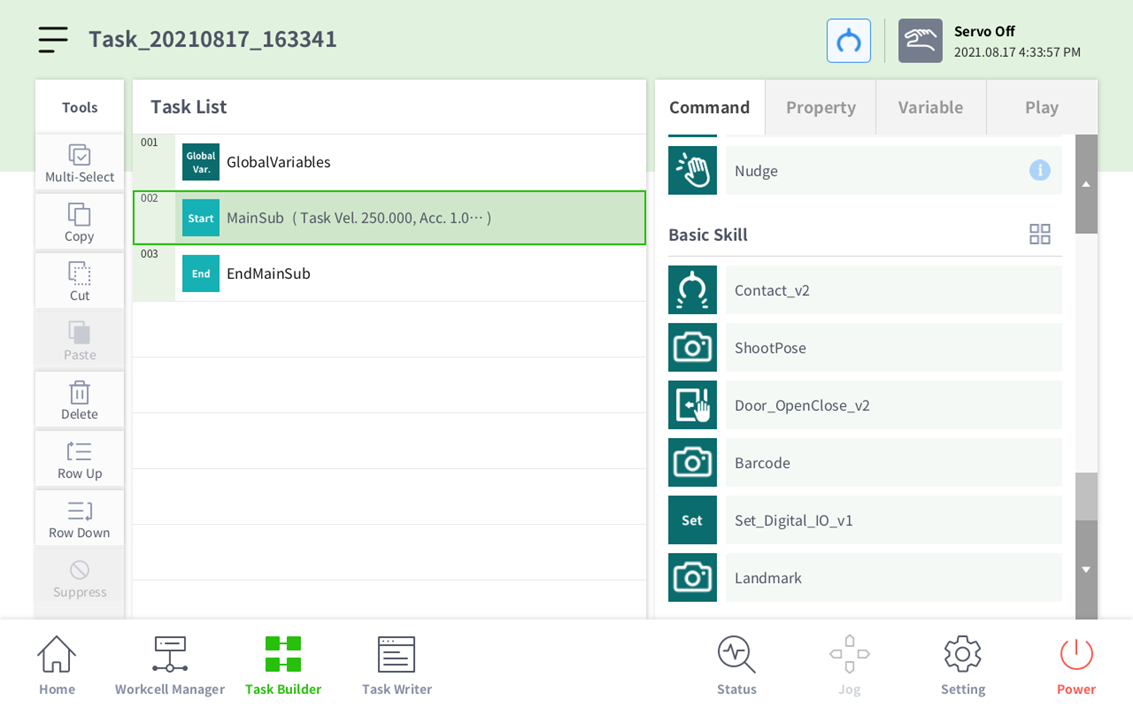
'Vision Skill: Vision Skill 설치하기'를 마무리하고 Command 스크롤바를 아래로 내려서 ShootPose 스킬이 있는지 확인합니다. 있다면 그림 순서에 맞춰 진행합니다.
-
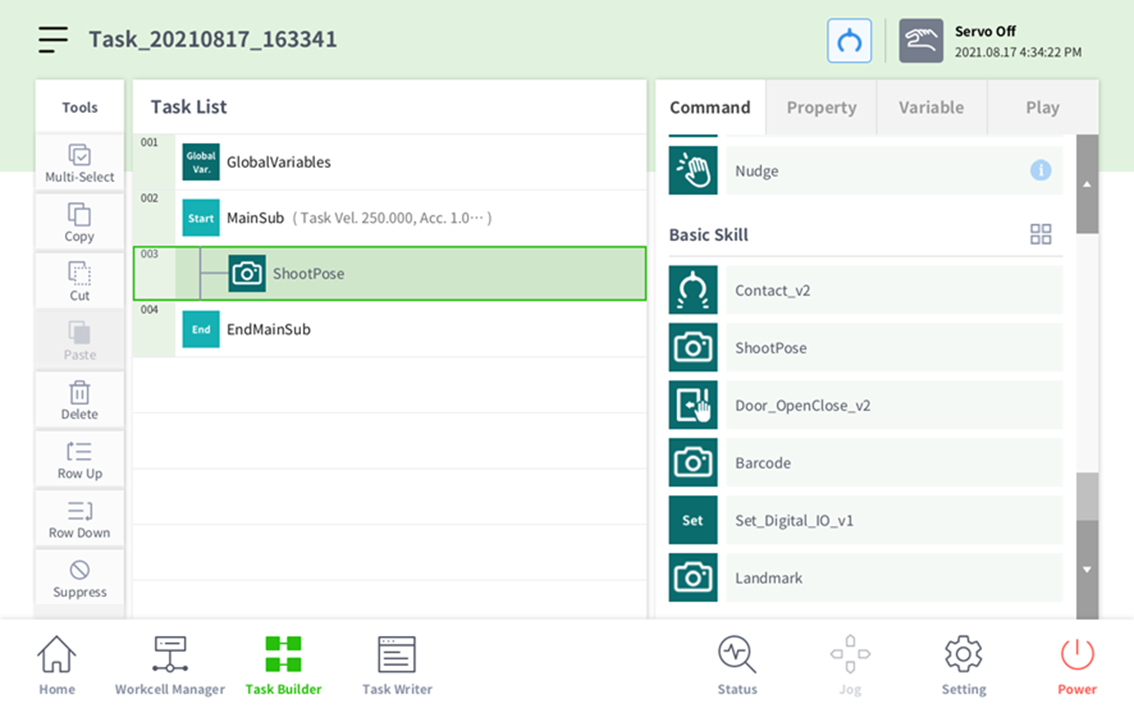
Command Tab에서 Shoot Pose 버튼을 클릭해 ShootPose Skill을 추가한다.
-
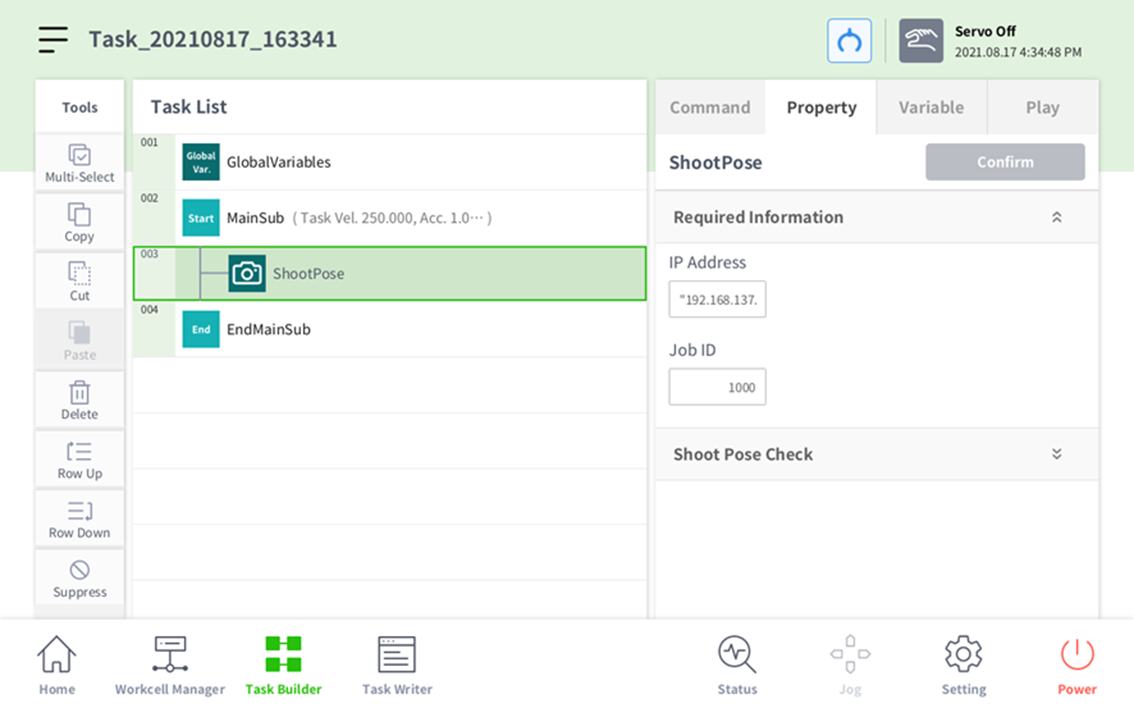
Property Tab에서 Required Information을 Open하고 SVM의 IP Address와 Job ID를 입력한다.
-
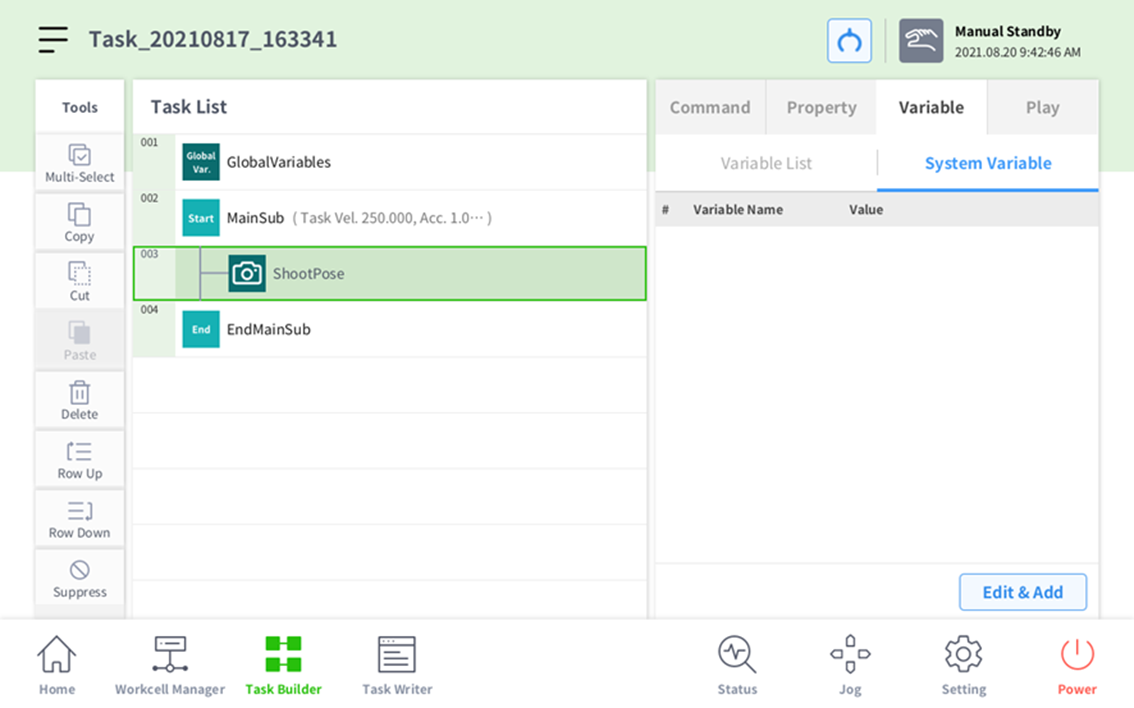
Variable Tab에서 Edit & Add 버튼을 누릅니다.
-
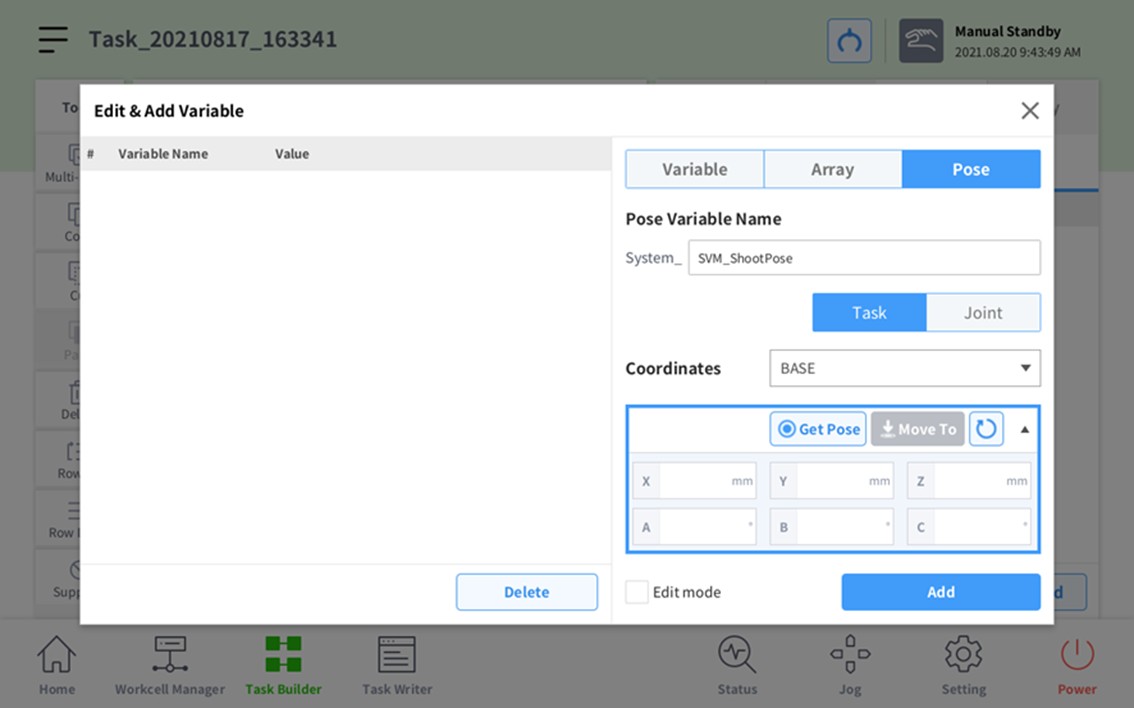
System_SVM_ShootPose를 추가합니다.
-
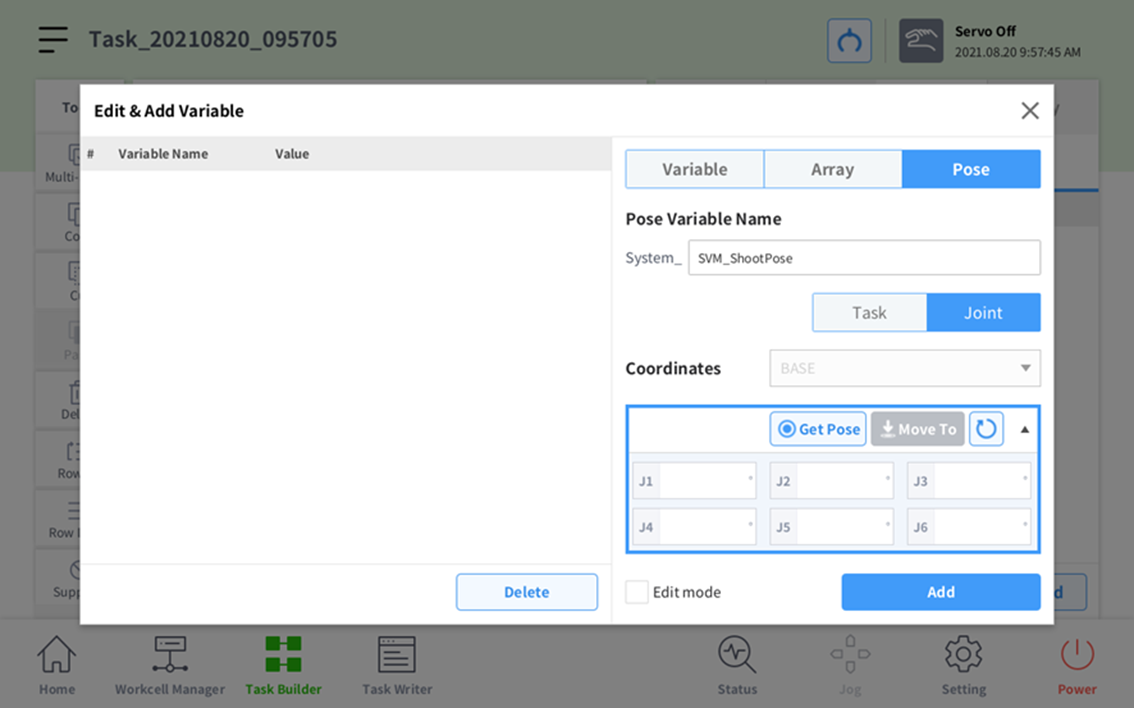
ShootPose는 조인트 좌표이므로 Joint 버튼을 누릅니다.
-
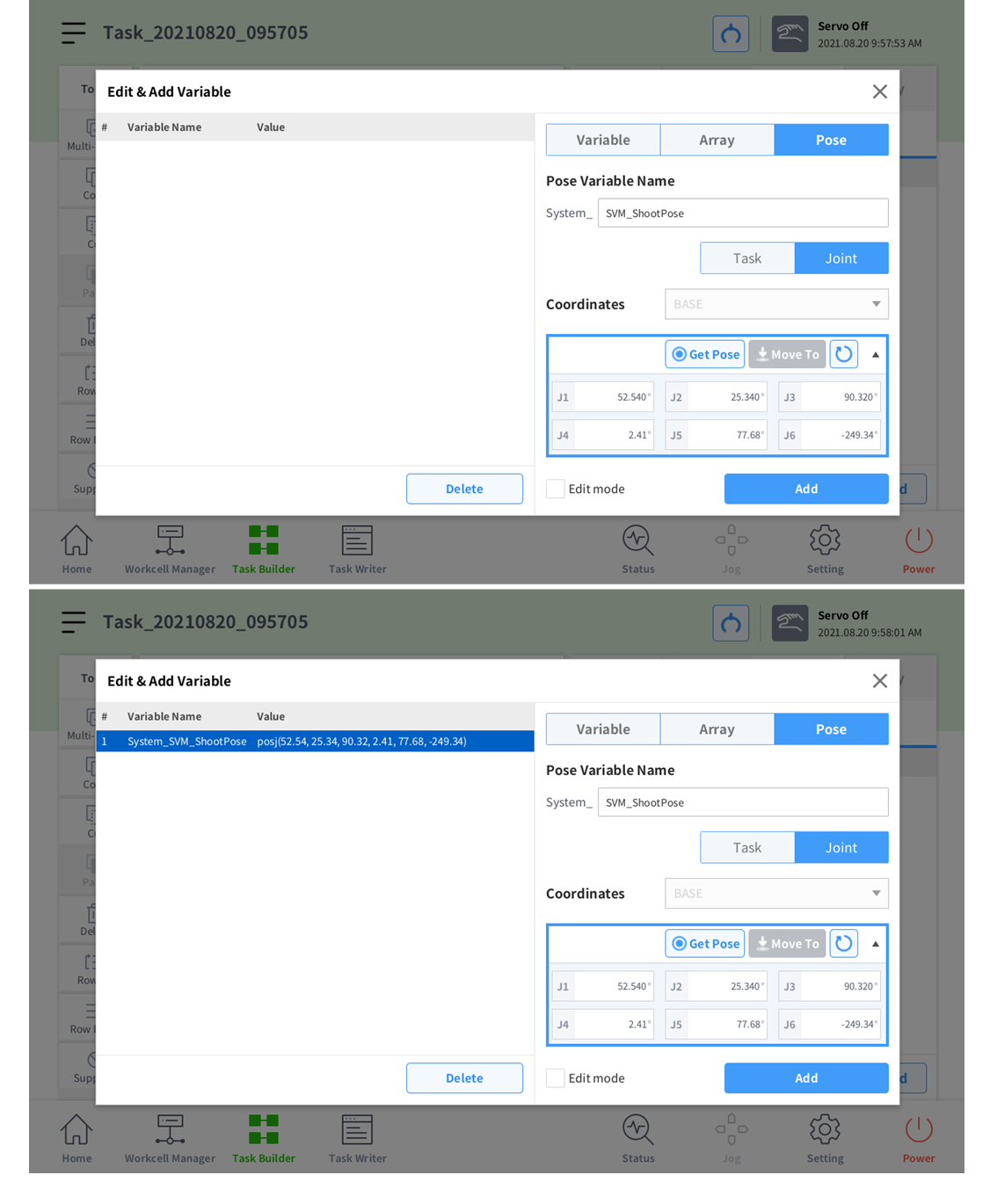
Get Pose를 누릅니다. Add 버튼을 누르면 Variable이 추가됩니다.
-
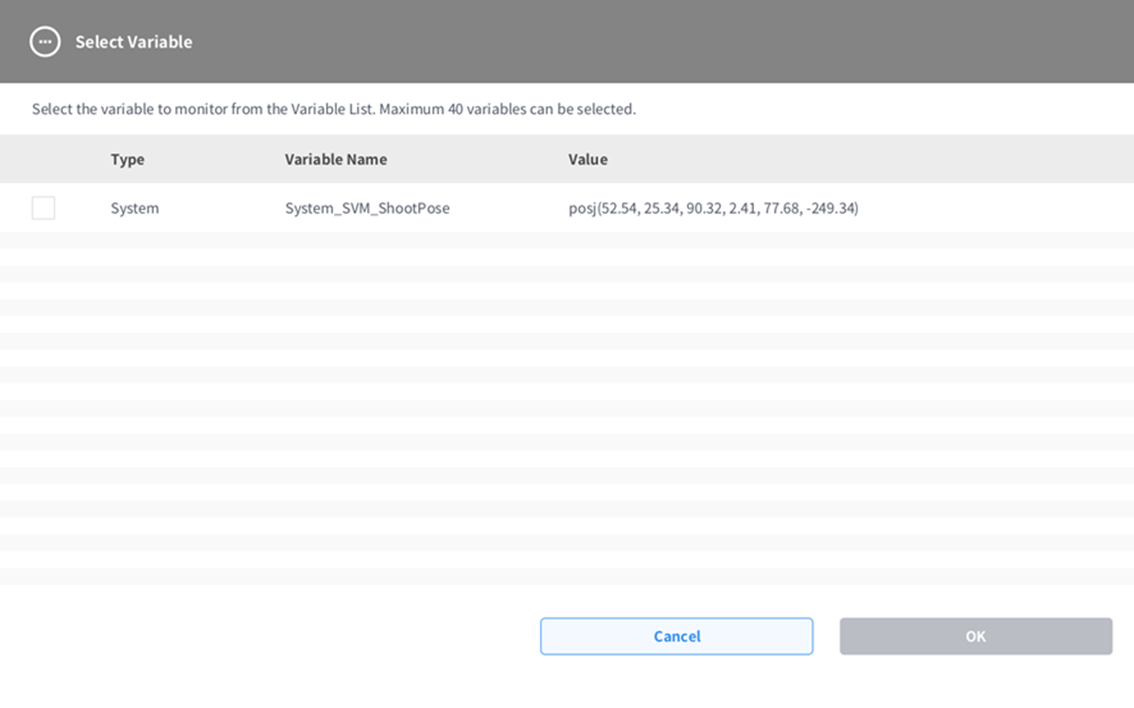
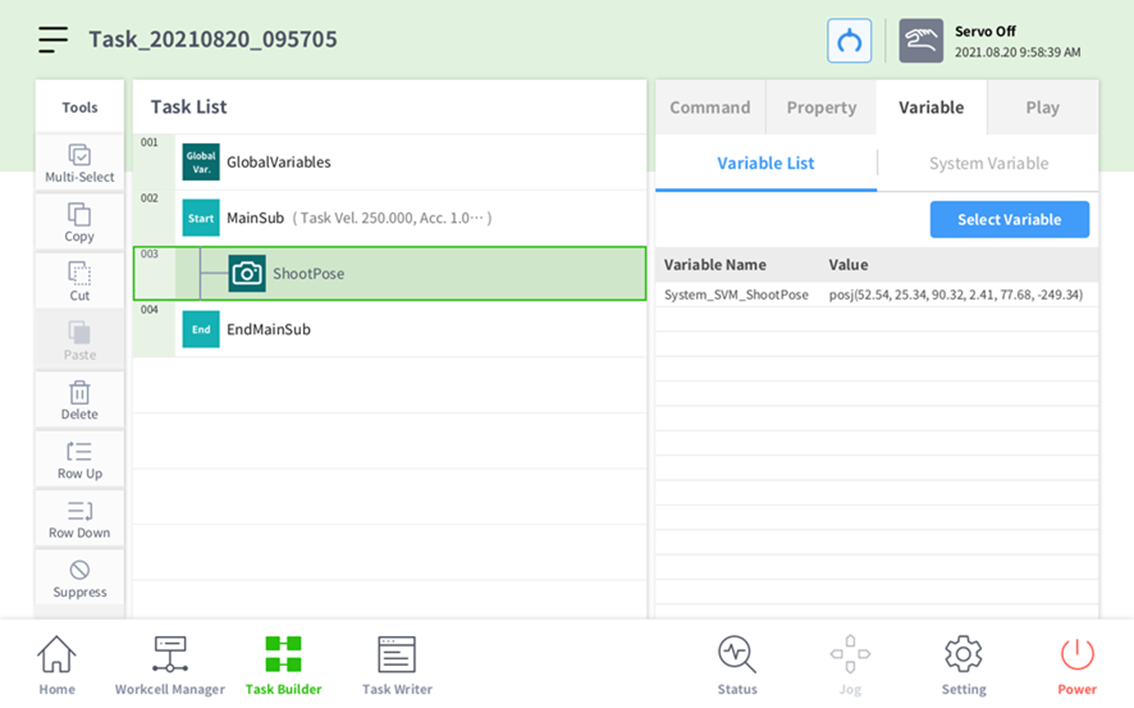
창을 종료하고 Variable List 버튼을 누른 뒤 Select Variable 버튼을 누릅니다.
-
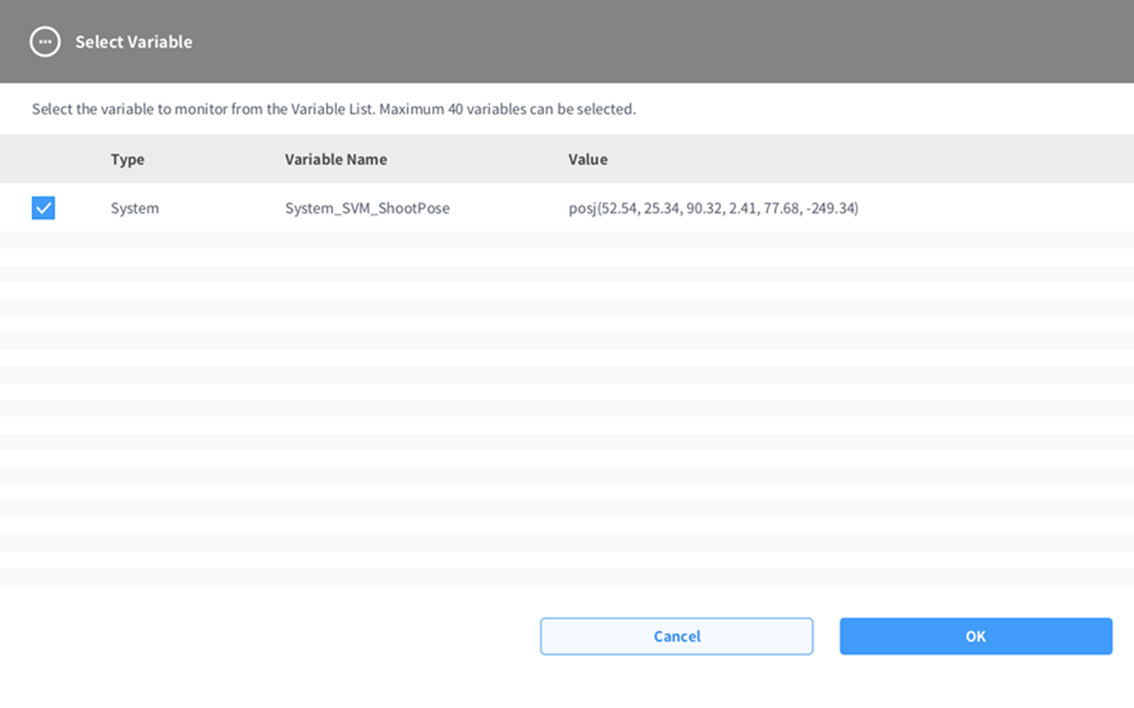
System_SVM_ShootPose 체크 버튼을 클릭한 뒤 확인을 누르면 Variable선택이 됩니다.
-
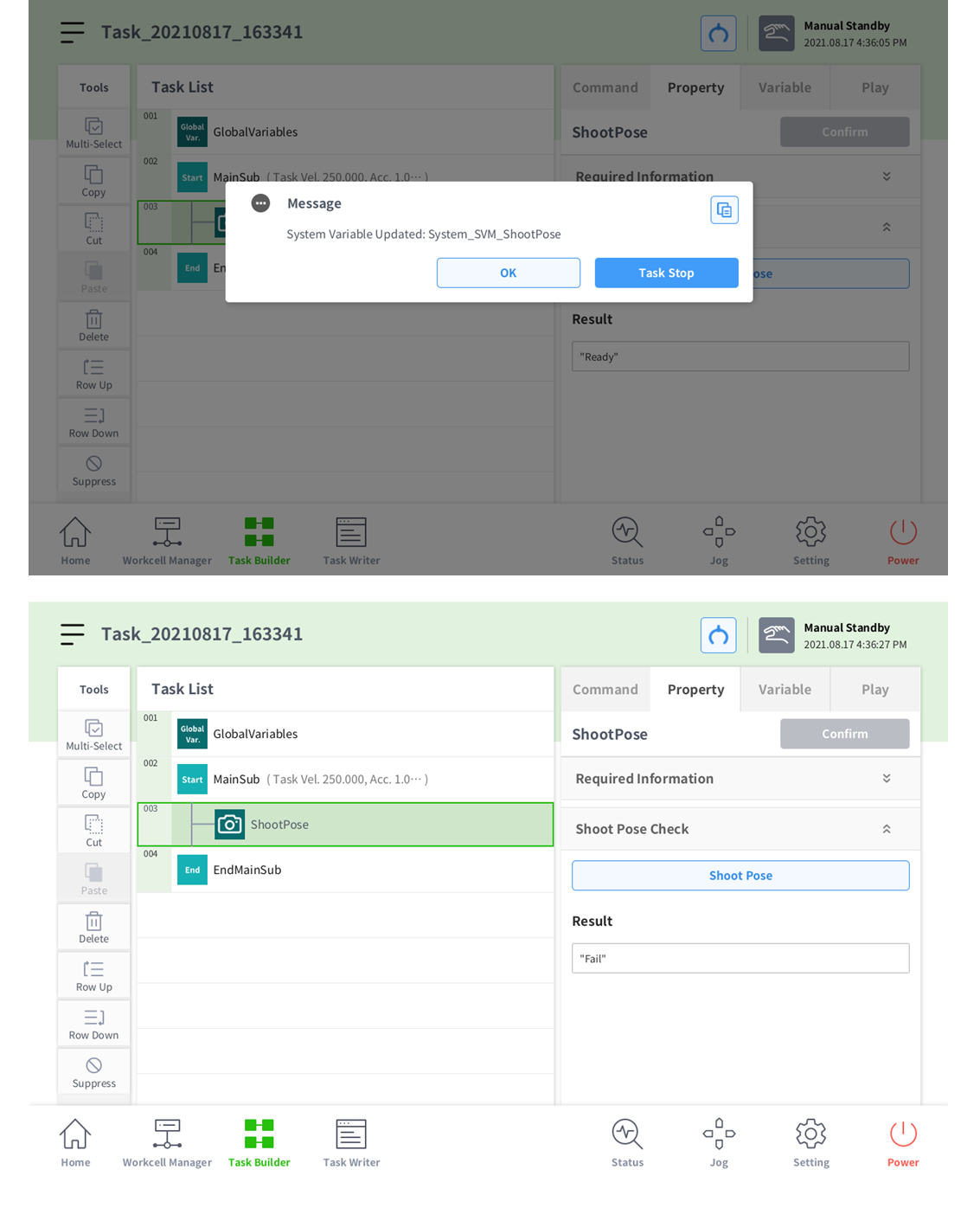
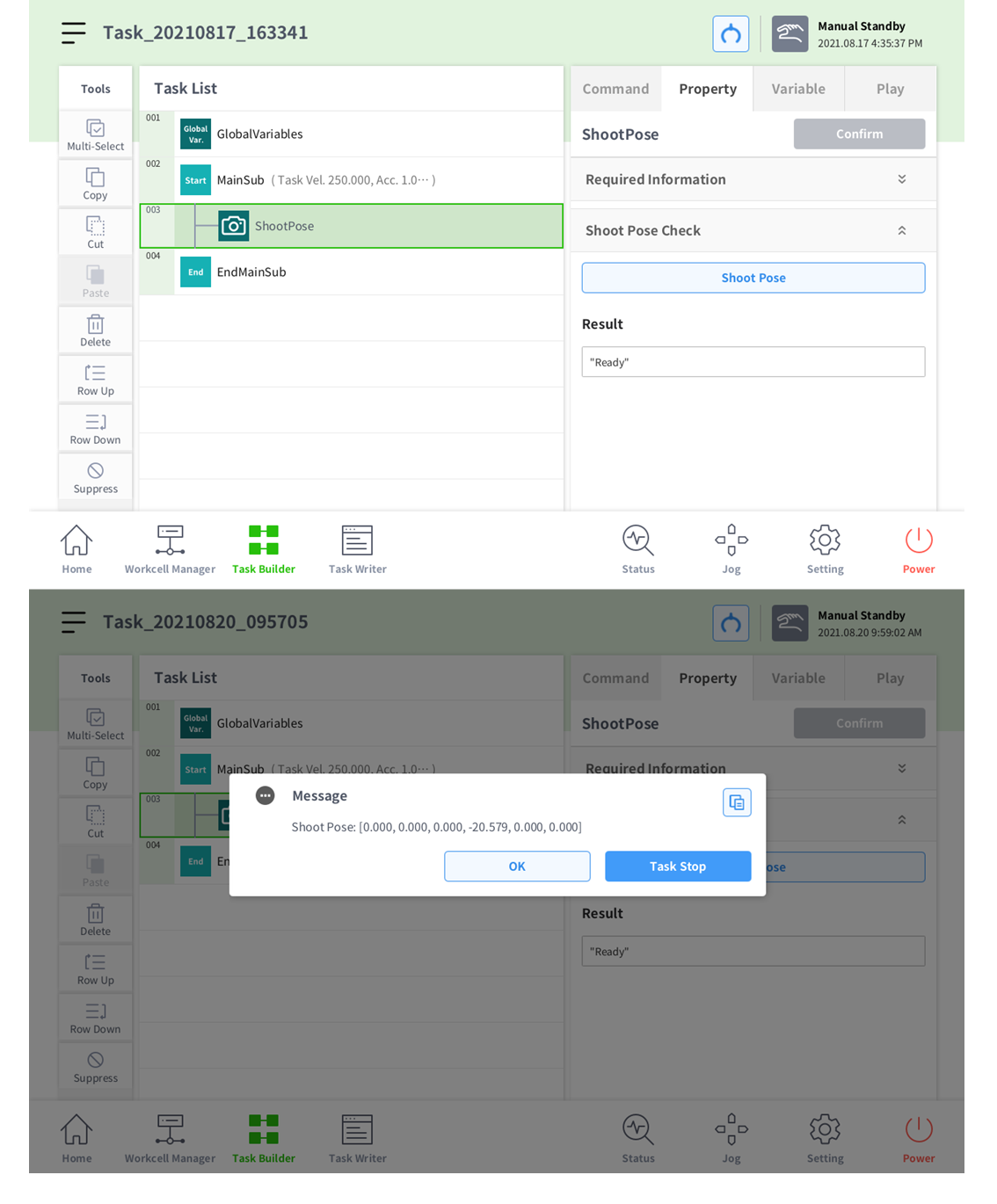
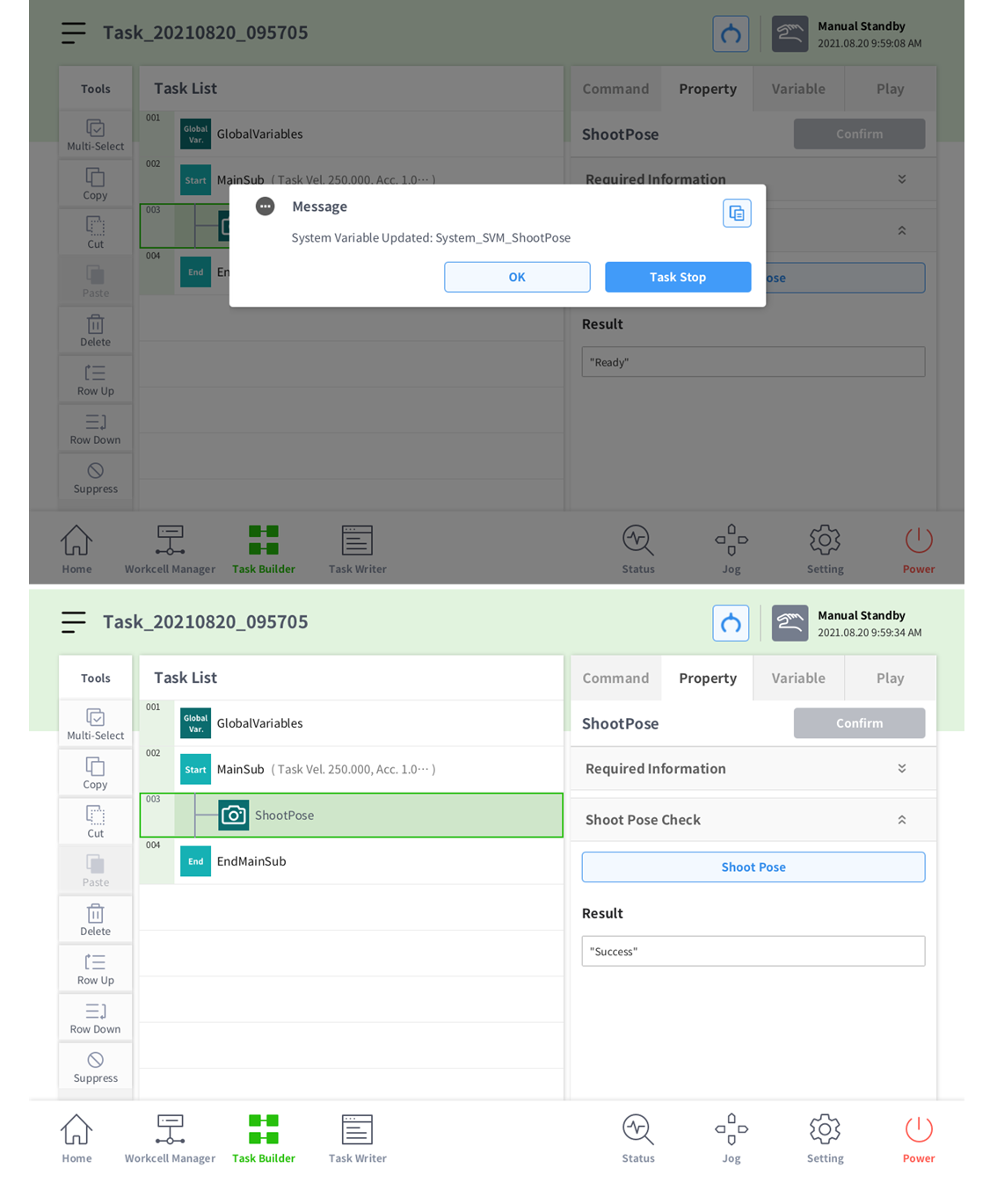
Property Tab으로 돌아와 Shoot Pose Check를 Open하고 Shoot Pose 버튼을 클릭합니다.
-
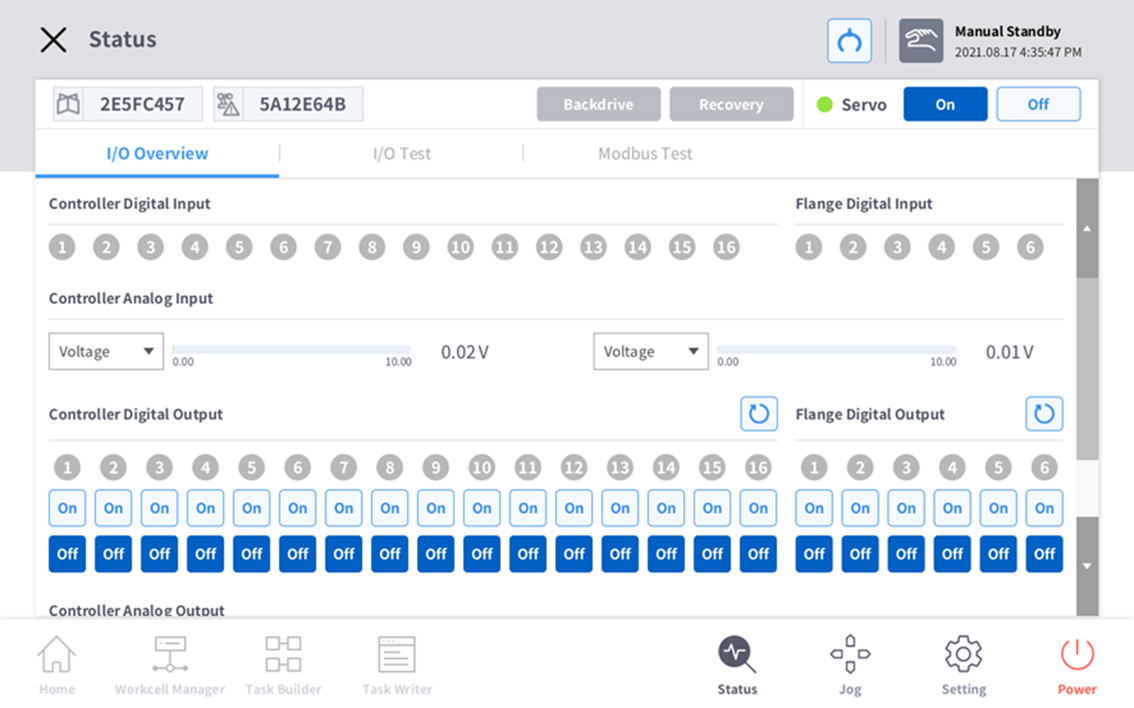
Property Check 테스트를 하기 위해서는 로봇이 서보온 상태여야 합니다.
-
시스템 변수 System_SVM_ShootPose를 추가하지 않으면 사용할 수 없습니다.