Pokud dojde k problému během provozu robota nebo uživatel vydá příkaz, robot přestane pracovat a zobrazí vyskakovací zprávu, která operátorovi umožní zasáhnout a situaci vyřešit. Poté, co uživatel problém vyřeší, úloha pokračuje na řádku programu, kde k problému došlo.
Poznámka
-
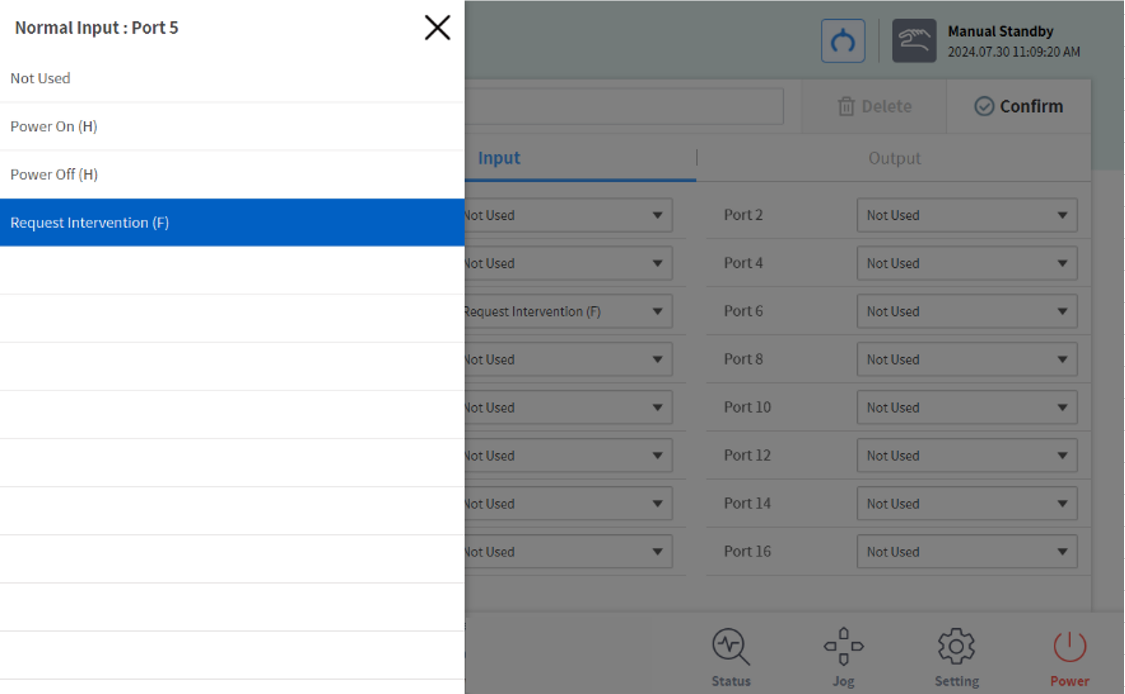
Chcete-li použít funkci zásahu pracovníka, musíte provést jedno z níže uvedených nastavení.
-
Workcell Manager - Normal I/O - Input - Request Intervention (F)
-
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Podrobné nastavení naleznete v Welding Techinical Note.)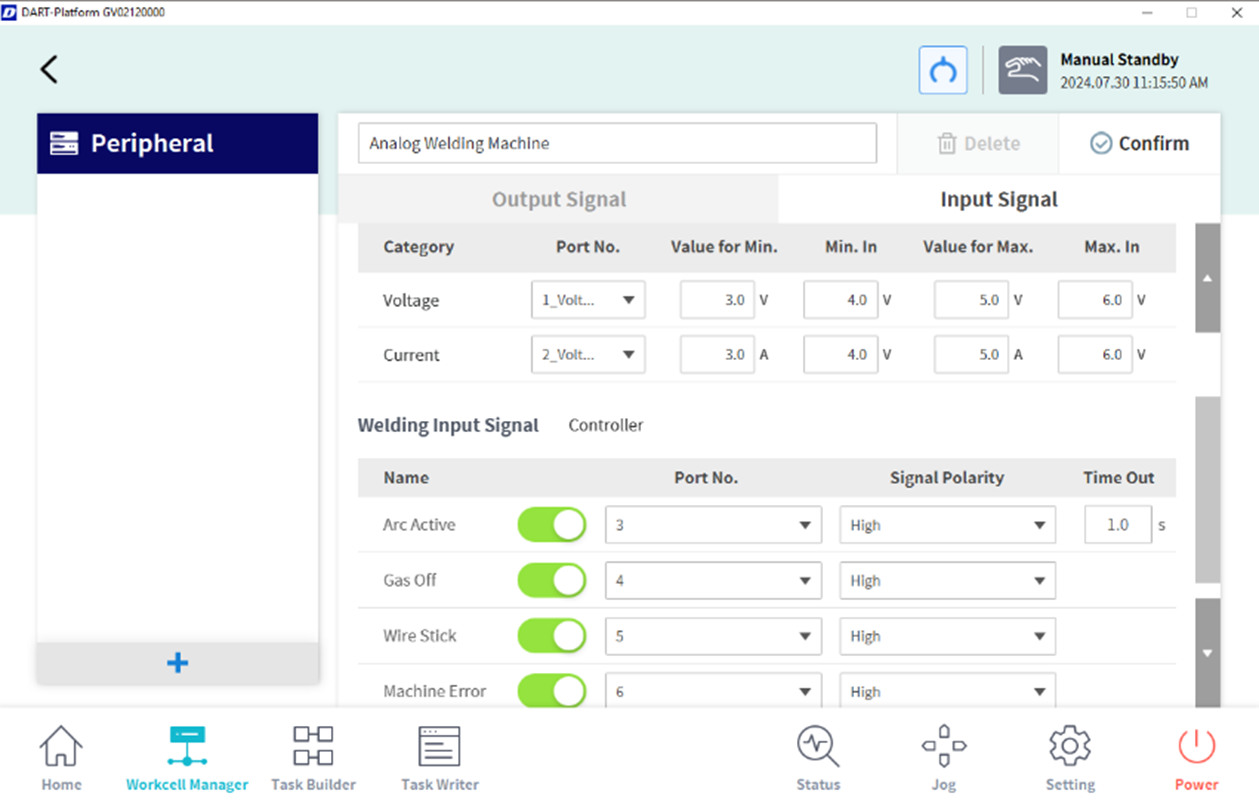
-
-
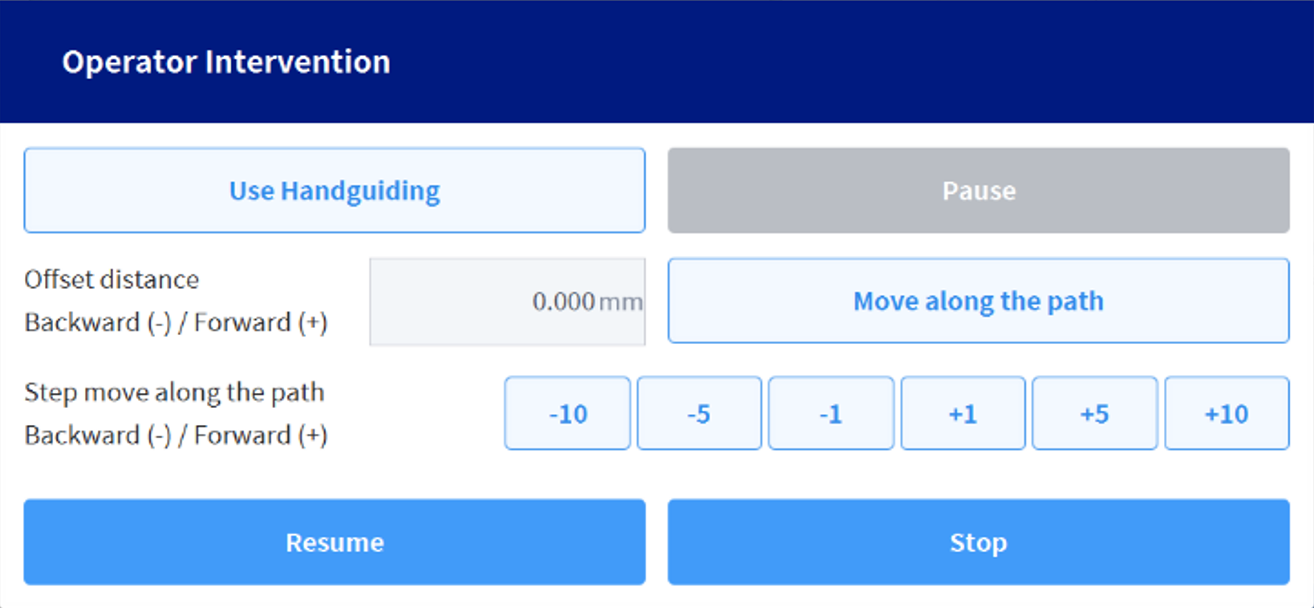
Tlačítka „Posunout po cestě“ a „Tlačítko Posun (-10,-5,-1,+1,+5,+10)“ provádějí stejnou akci. První se však pohybuje dopředu nebo dozadu z referenční polohy ručně zadaným Offsetem, zatímco druhý cílí bod dopředu nebo dozadu o přednastavený krok Offset. Po dokončení akce pomocí výše uvedených tlačítek se stisknutím dalšího tlačítka posune aktuální pozice o Offset.
-
Tlačítko „Use Handguiding button“ se aktivuje pouze tehdy, když je nastavena Collaborative Zone a stav robota se změní na stav Handguiding, který umožňuje přímou výuku v rámci zóny. Poté můžete přímou výuku aktivovat stisknutím tlačítka na zadní straně kokpitu nebo přívěsku Výuka.
-
V režimu navádění rukou se „Použít tlačítko navádění rukou“ změní na „Tlačítko ukončit navádění rukou“.
-
Když stisknete tlačítko „Ukončit ruční navádění“, stav ručního navádění se ukončí. V tuto chvíli se z bezpečnostních důvodů porovnává aktuální poloha robota, úhel a hodnoty bodu zastavení (čas, kdy se objeví první vyskakovací okno), aby se vytvořilo vyskakovací okno. Pokud se objeví vyskakovací okno s následujícím obsahem, musíte se znovu naučit přímo opravit polohu a držení robota a zkusit to znovu.
-
Pokud se přímá vzdálenost mezi aktuální polohou TCP a TCP v koncové poloze liší o více než 20 cm
-
Pokud se rozdíl mezi aktuálním úhlem spoje a úhlem spoje v bodě zastavení liší o více než 1~3 osy (10 stupňů) / 4~5 os (30 stupňů) / 6 os (60 stupňů)
-
-
Tato funkce je podporována pouze během operací MoveL / MoveC / MoveB.
-
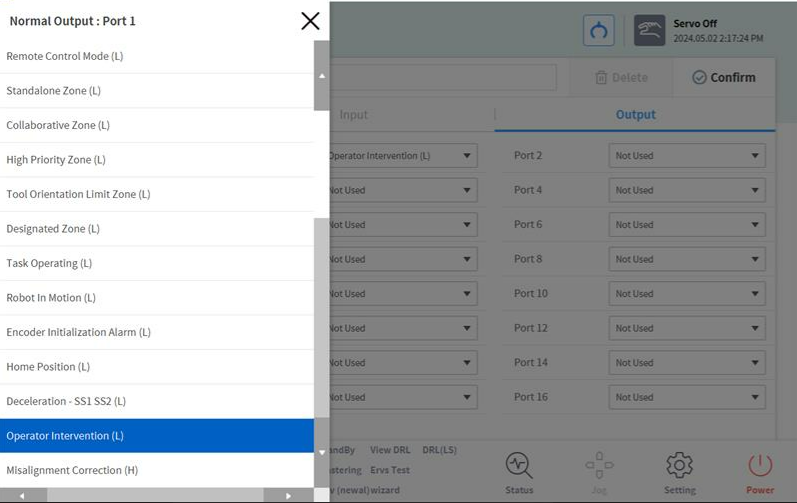
K signalizaci, že se objevilo vyskakovací okno, můžete použít funkci Normální výstup. Signál zůstane aktivní, když se objeví vyskakovací okno, a bude deaktivován, když vyskakovací okno skončí.
-
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
-
Zde je scénář použití:
-
Přijímat digitální vstupní signál od uživatele nebo připojeného zařízení, zatímco program běží.
-
Robot se zastaví a objeví se vyskakovací okno pro zásah operátora.
-
(Pokud používáte přímou výuku) Stisknutím tlačítka Použít navádění rukou a poté stisknutím tlačítka na zadní straně kokpitu nebo výukového přívěsku aktivujte přímou výuku. Po dokončení operace přímého učení stiskněte tlačítko End Handguiding.
-
Stisknutím tlačítka Pohyb po cestě přesunete robota po cestě.
-
Po požadovaném pohybu robota stiskněte tlačítko Pokračovat pro obnovení úlohy robota a zavřete vyskakovací okno.