A robot a cél szöge/koordinátái szerint mozgatható a Mozgatás képernyőn. Ha ismertek annak a helynek a koordinátái, ahová a robotot mozgatni kell, vagy ha a robotot tizedes jegy pontosságú koordinátáig kell mozgatni, a robot mozgatható a koordináták megadásával.
|
Sz. |
Elem |
Leírás |
|---|---|---|
|
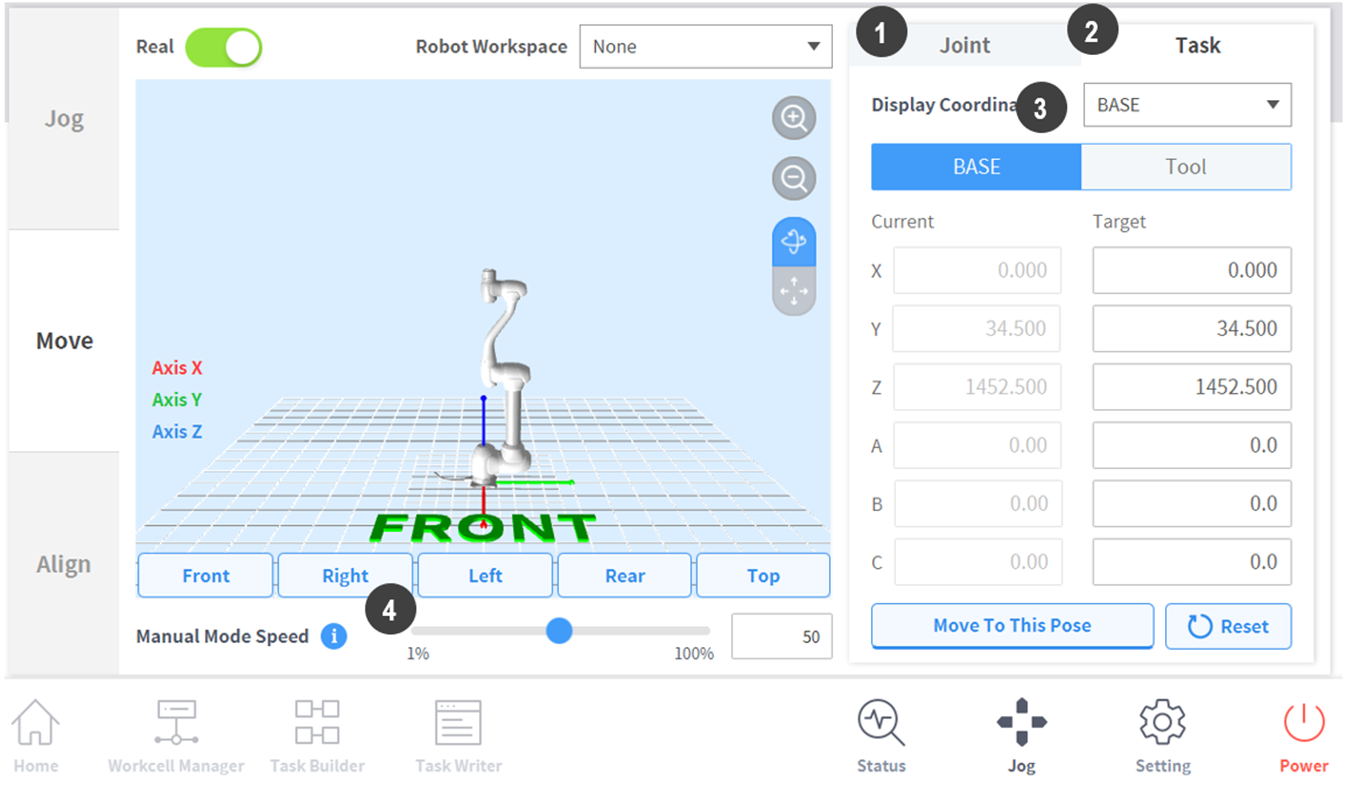
1 |
Joint |
Konfigurálja a robotnak léptetéssel való mozgatásakor használandó referencia koordinátát. |
|
2 |
Task |
Konfigurálja a robotnak léptetéssel való mozgatásakor használandó referencia szöget. |
|
3 |
Reference Point Setting |
Konfigurálja a referenciapontot a feladat koordinátájának igazításához. Alap: A robot alap alapján állítja be a feladat koordinátáit. Világ: A beállított bilág koordináták alapján állítja be a feladat koordinátáit. Szerszám: Konfigurálja a feladat koordinátáját a robot hatodik tengelyének végére felszerelt szerszám alapján. |
|
4 |
Manual Mode Speed |
Kézi üzemmódra konfigurálja a robot mozgási sebességét. A sebesség a csúszkamutató húzásával módosítható. Ha a csúszkamutató 100%-nál van, a hozzá tartozó csuklósebesség a Mozgatás fülön 30 fok/s, és a feladat maximális sebessége 250 mm/s. A sebesség meghatározza a léptetés és a gomb működtetési sebességét. |