Opcionális Normál 10 perc
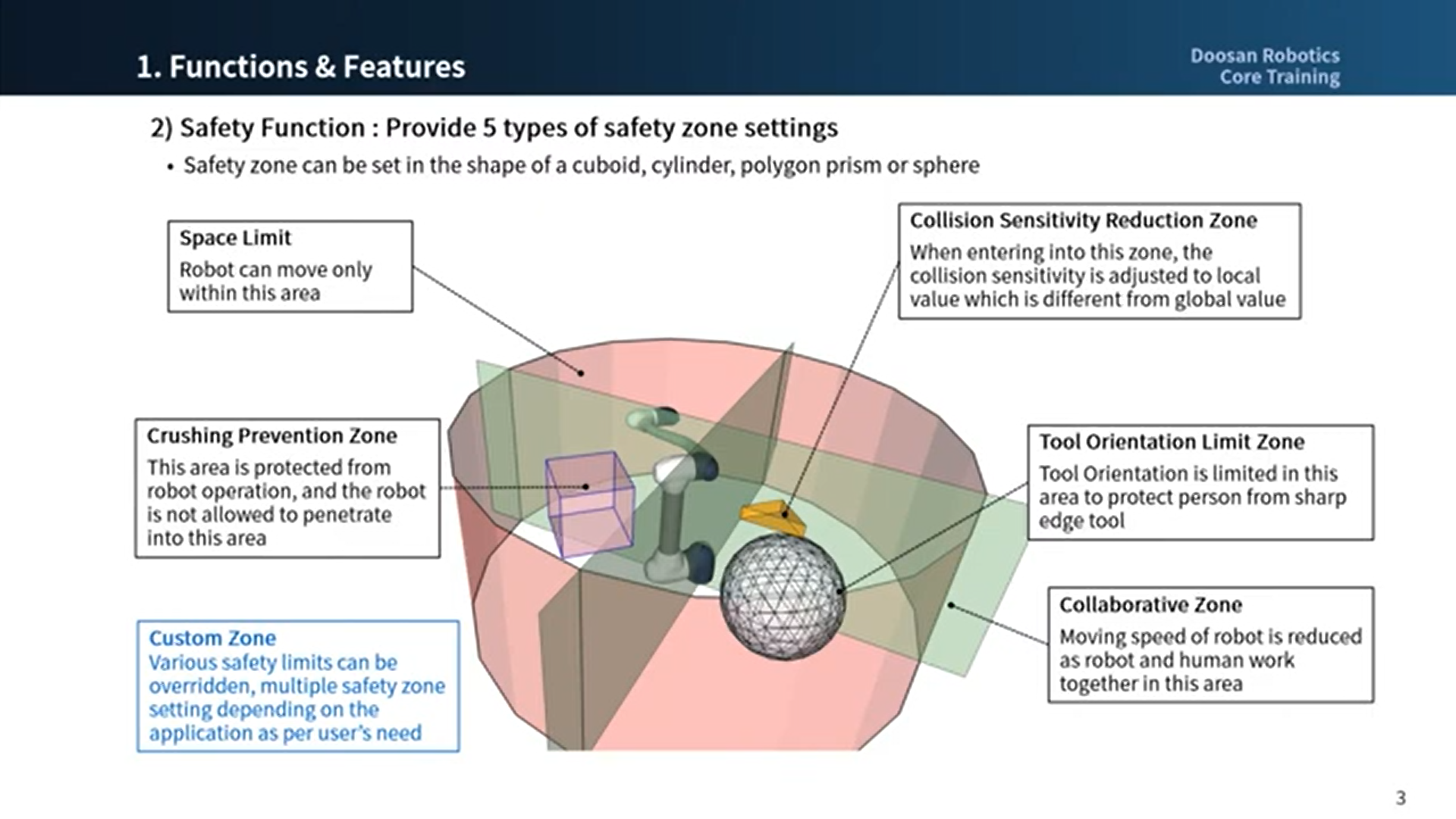
A Space Limit Workcell (térhatár) elem virtuális határt állít be a robot legkülső zónájában. A robot a helykorlátok beállítása nélkül működtethető, de a robot biztonságos működésének biztosítása érdekében ajánlott a helykorlátok beállítása.
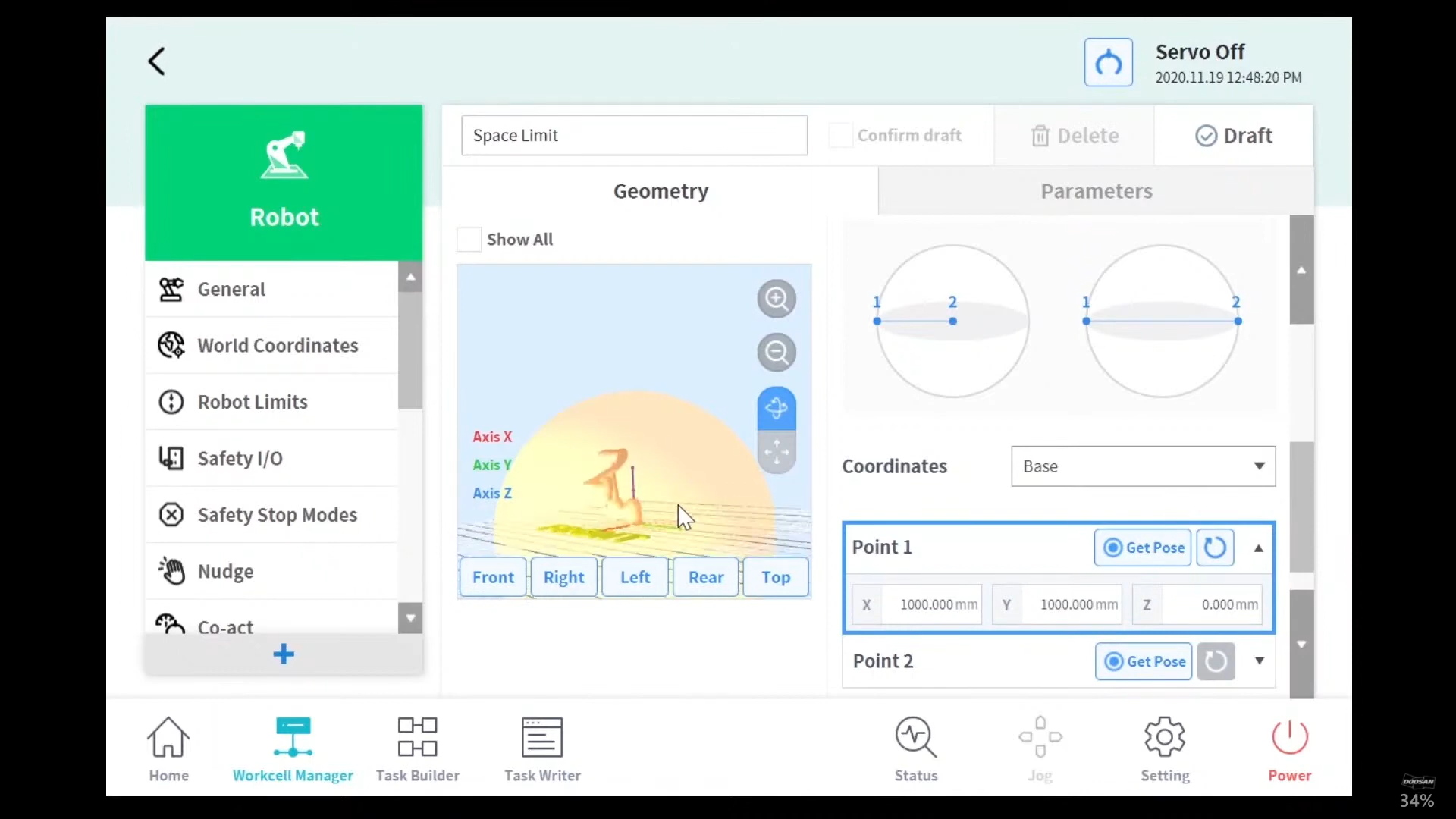
A Space Limit a Workcell Manager > > Space Limit > Cuboid, henger, Multi-plane Box, Sphere vagy döntött Cube menüpontban állítható be 
-
Az ellenőrzési pont beállítható robotként vagy TCP-ként, és az érvényes hely belső vagy külső lehet.
-
A megfigyelési zóna beállítható robotként vagy TCP-ként. Beállítja, hogy érzékeli-e a belső vagy külső zónát.
-
Az alapértelmezett érték a teljes zóna és a belső tér.
-
A robot a beállított biztonsági zónában történő elhelyezése után megfelelően beállítható.
Opcionális Normál 10 perc
A Space Limit Workcell (térhatár) elem virtuális határt állít be a robot legkülső zónájában. A robot a helykorlátok beállítása nélkül működtethető, de a robot biztonságos működésének biztosítása érdekében ajánlott a helykorlátok beállítása.
A Space Limit a Workcell Manager > > Space Limit > Cuboid, henger, Multi-plane Box, Sphere vagy döntött Cube menüpontban állítható be
-
Az ellenőrzési pont beállítható robotként vagy TCP-ként, és az érvényes hely belső vagy külső lehet.
-
A megfigyelési zóna beállítható robotként vagy TCP-ként. Beállítja, hogy érzékeli-e a belső vagy külső zónát.
-
Az alapértelmezett érték a teljes zóna és a belső tér.
-
A robot a beállított biztonsági zónában történő elhelyezése után megfelelően beállítható.