ロボットのTCPを、ワークセル項目を基準として整列します。
-
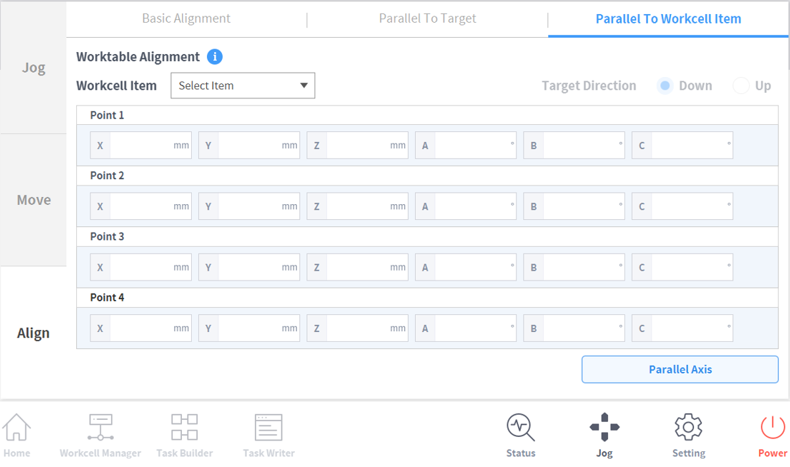
Alignタブを選択した後、Alignment based on the Workcell Itemsタブを選択してください。
-
Workcell Itemで目的の項目を選択してください。
-
整列方向を選択してください。
-
Parallel Axisボタンを長押しして、軸を整列してください。
-
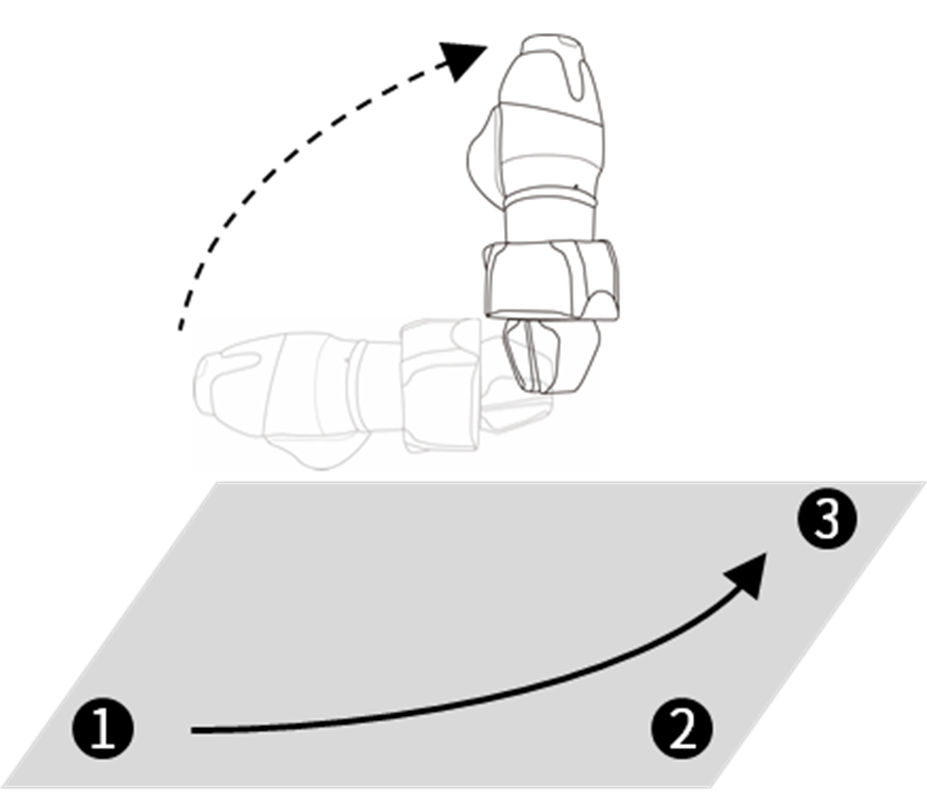
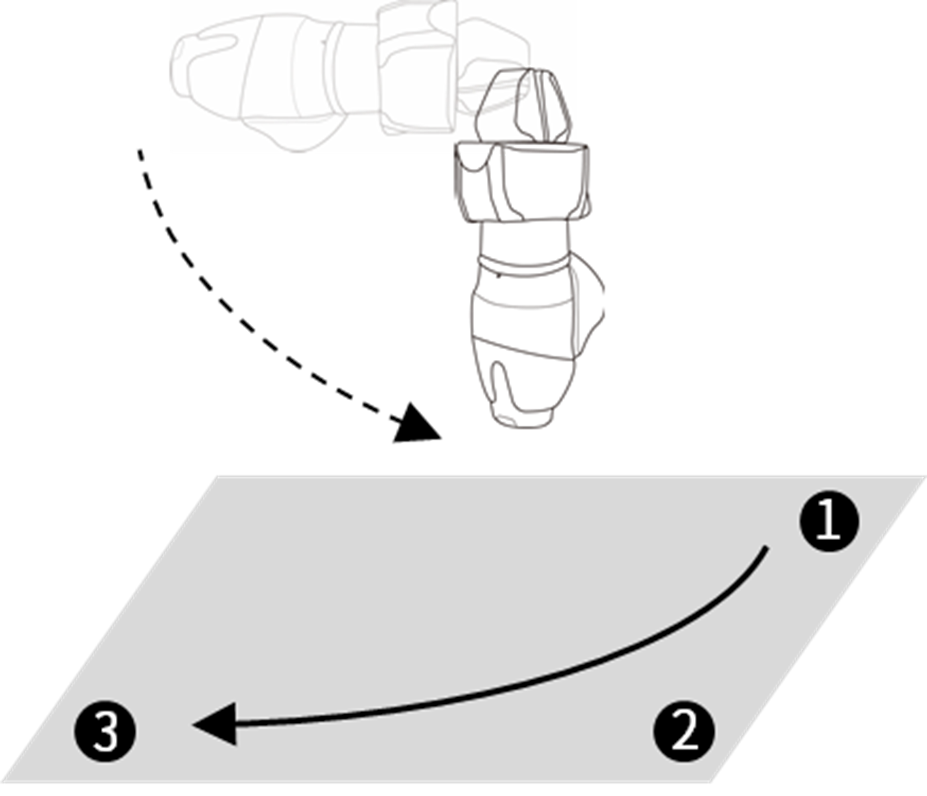
“目標物を基準として整列する ”と“”での整列方向は、ワークセルアイテムでティーチングされた三点のティーチング順序が時計回りか反時計回りかによって決定されます。[下の図を参照]