作業対象物がロボットベース/ワールドの軸方向に並んで置かれている場合、作業物をティーチングする前に対象物にTCPを整列できます。ティーチングポーズをベース/ワールド座標軸に並べて設定できるため、容易にティーチングポーズを特定できます。ポーズを固定してからティーチングを行うには、コクピットボタンを利用した面又は線の固定ダイレクトティーチング機能を利用してください。
ロボットのTCPをベース軸を基準として整列するには:
-
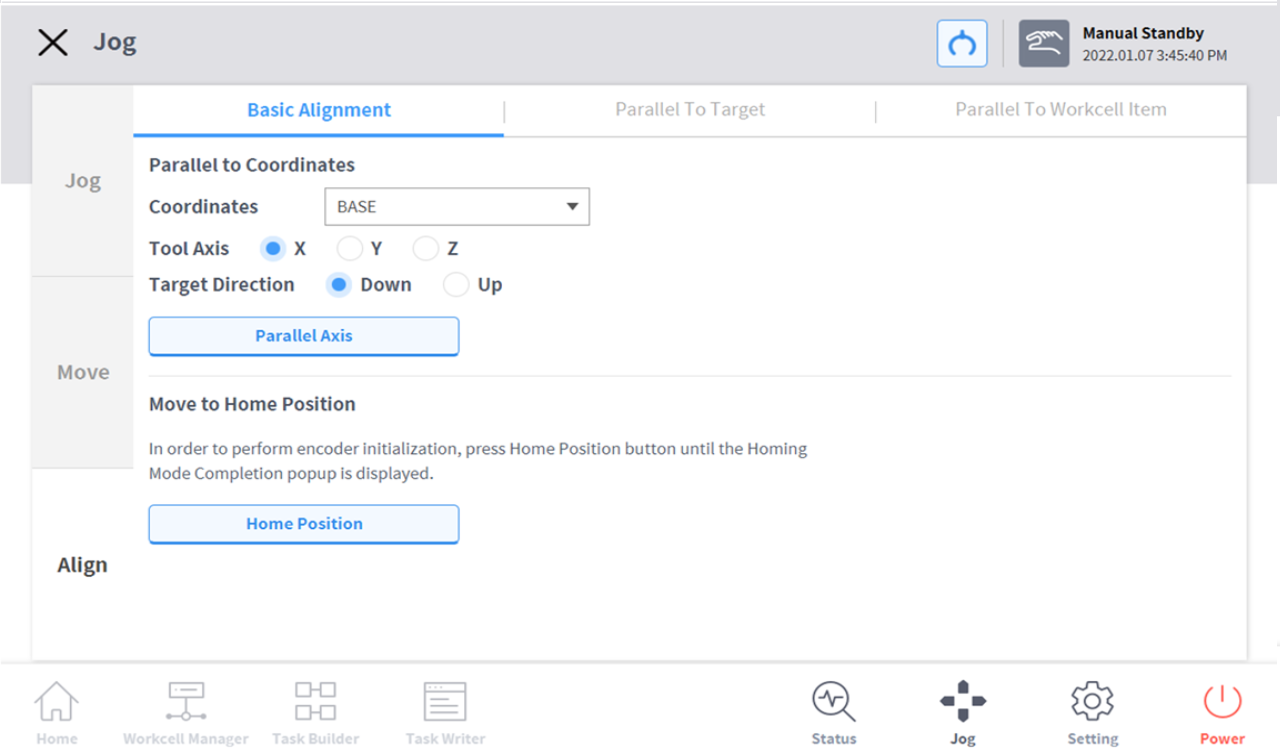
Alignタブを選択した後、Basic Alignmentタブを選択してください。
-
整列しようとする基準座標系を選択してください。

-
基準となるツール軸を選択してください。

-
整列方向を選択してください。

-
Parallel Axisボタンを長押しして、軸を整列してください。