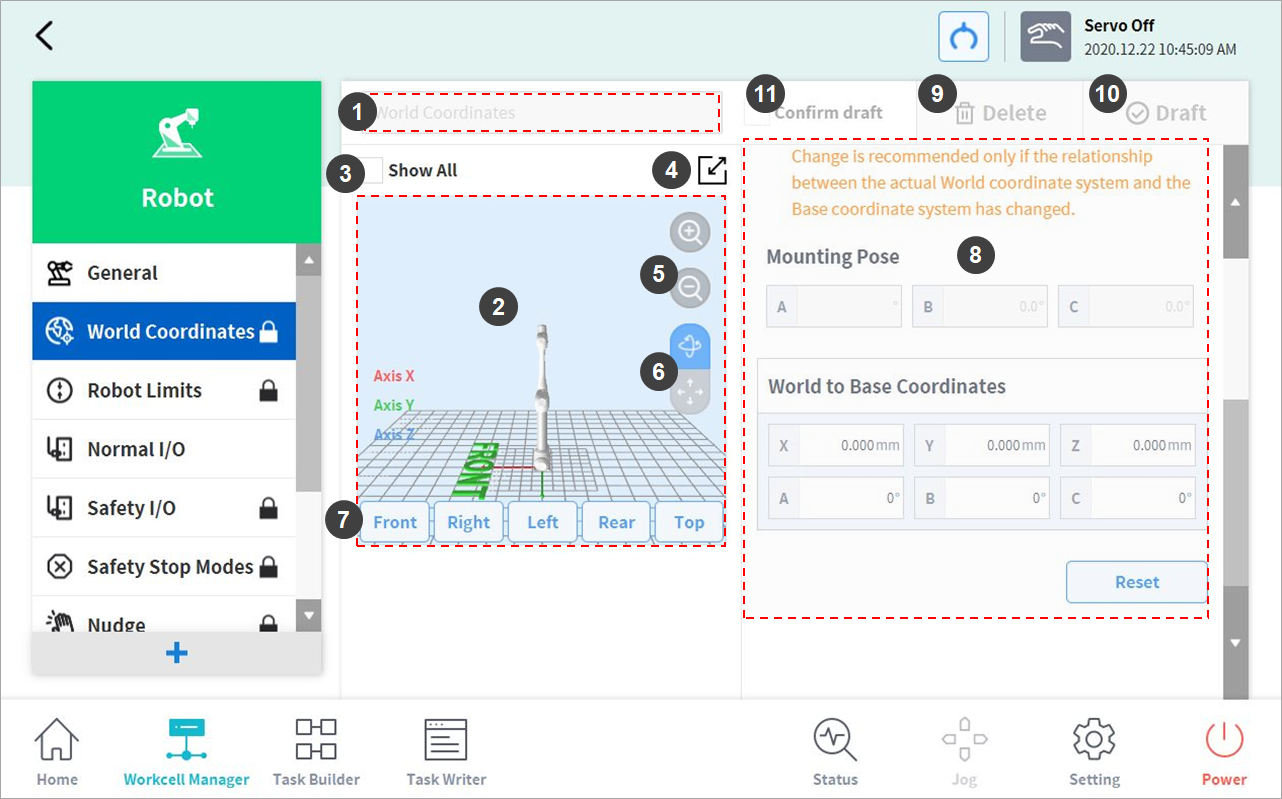
机器人设置屏幕包括以下内容:
|
编号 |
项 |
说明 |
|
1 |
Enter Workcell Name |
输入工作单元的名称。 |
|
2 |
Simulation Screen |
显示工作单元的作业空间模拟。 |
|
3 |
View All |
显示所有其他已注册的工作单元。选中所有复选框将启用 View All(查看全部)功能。取消选中复选框将禁用该功能。 |
|
4 |
Change to Full Screen ( |
模拟屏幕以全屏模式显示。在全屏模式下点击最小化按钮 ( |
|
5 |
Zoom In ( |
缩放模拟屏幕。 |
|
6 |
Rotate ( |
旋转或移动模拟屏幕。点击按钮并拖动或点击屏幕进行控制。 |
|
7 |
Simulator Direction Setting |
设置模拟器的方向。以所选方向显示模拟。 |
|
8 |
Workspace |
显示工作单元的工作区。 |
|
9 |
Delete |
删除当前的工作单元。 |
|
10 |
Draft Confirm |
Draft(草稿):临时保存工作单元的工作区设置。 Confirm(确认):保存工作单元的当前工作区设置,或者经过确认后保存先前临时保存的工作区设置。 (对于安全相关工作单元,在执行 Confirm Temporary Save(确认临时保存)后显示 Confirm(确认)按钮。对于常规工作单元,则仅显示 Confirm(确认)按钮。) |
|
11 |
Confirm Draft |
确认保存先前临时保存的工作区设置。 (仅在安全相关工作单元中显示,在常规工作单元中则不显示) |






Scroll conditional content
1m/hseries
Scroll conditional content
2aseries
Scroll conditional content
3eseries
Scroll conditional content
hidecontents
Scroll conditional content
tet