Opcionális Normál 20 perc

Ezt a mintát a Feladatíróba hozza létre. Ez a minta szinte ugyanúgy kipróbálható a Feladatszerkesztőn.
Vigyázat
-
Mielőtt megpróbálná a mintát, mindenképpen olvassa el és kövesse a következőt (2.11.0.1_temp-hu_HU) Használatra vonatkozó óvintézkedések: . További információkért lásd (2.11.0.1_temp-hu_HU) 1. RÉSZ. Biztonsági kézikönyv: .
Megjegyzés
-
Ha a megfelelőség-ellenőrzés engedélyezésekor vagy letiltásakor a küszöbérték feletti külső nyomaték van, a robot leállítja a programot a JTS (Joint Torque Sensor) hibája miatt.
Threshold of JTS error (Nm)
Model
J1
J2
J3
J4
J5
J6
M1013
25
25
25
15
15
15
M0617
30
30
30
15
15
15
M0609
18
18
15
15
15
15
M1509
18
18
15
15
15
15
H2515
40
50
40
15
15
15
H2017
40
50
40
15
15
15
-
A merevségi változás a külső nyomatékmérettől függetlenül végrehajtható.
-
A megfelelőség ellenőrzése során nem hajthatók végre közös mozgások, mint például a MoveJ parancs.
-
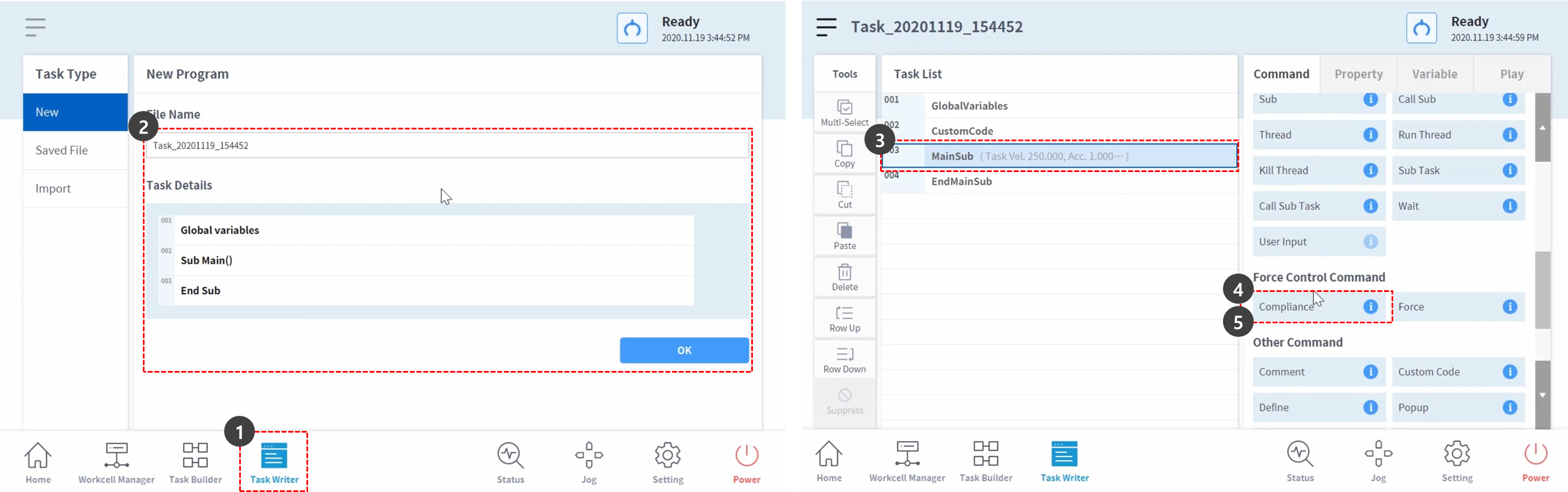
Válassza ki a Feladatírót az alsó menüből.
-
Adja meg a feladat nevét, majd nyomja meg az OK gombot.
-
Válassza ki a MainSub parancsot a feladatlista harmadik sorában . Egy új parancs kerül a kiválasztott sor következő sorára.
-
Compliance parancs hozzáadása. Ez a parancs a tervek szerint a compliance Control engedélyezéséhez használható.
-
Adjon hozzá egy másik megfelelőségi ellenőrzést. Ez a parancs a compliance Control letiltására szolgál.
-
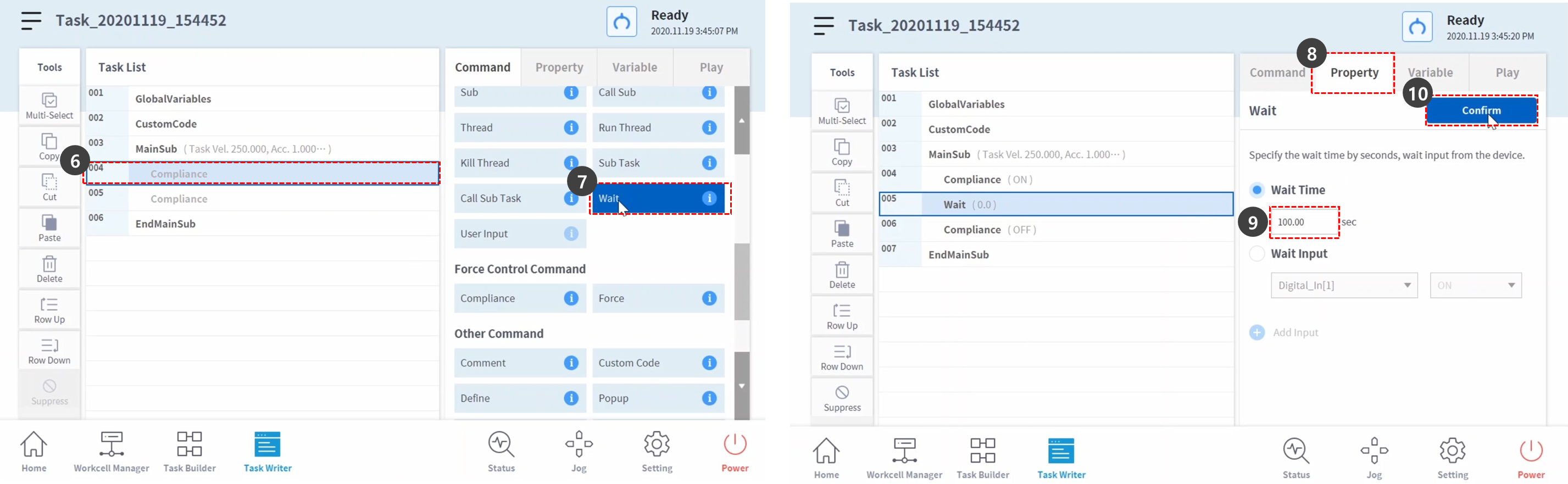
Válassza ki a negyedik sorban a compliance parancsot. Egy új parancs kerül a kiválasztott sor következő sorára.
-
Add WAIT parancs.
-
Válassza ki a tulajdonság lapot.
-
Állítsa be a várakozási időt a következők szerint:
-
Várakozási idő: 100 mp
-
-
Nyomja meg a jóváhagyás gombot.
-
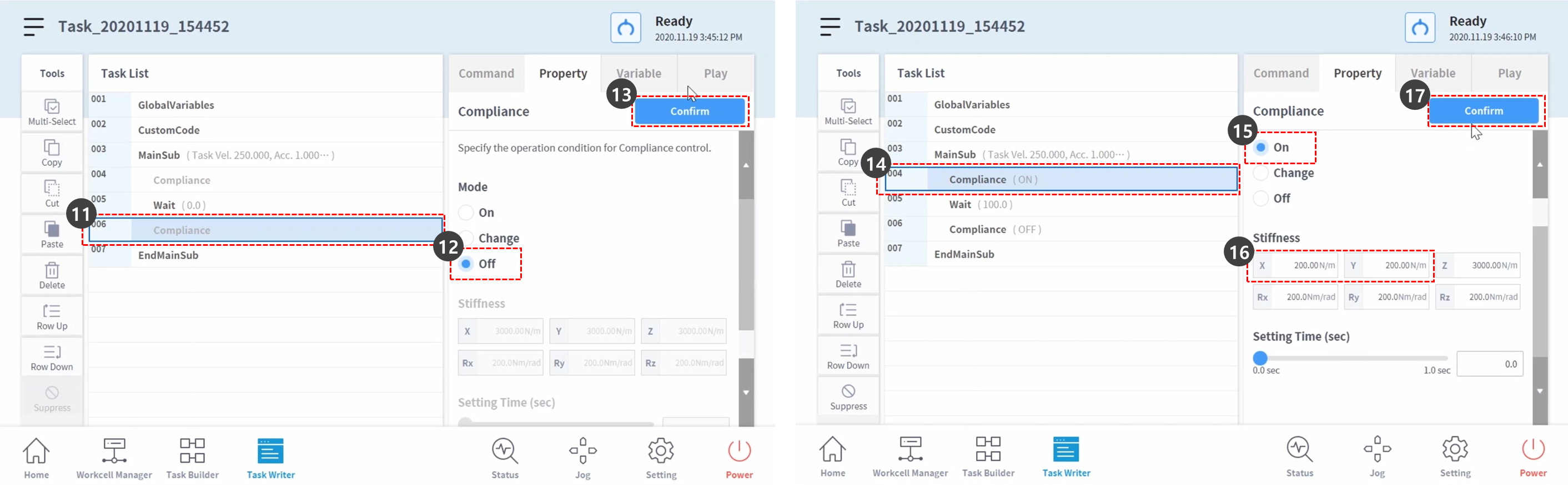
Válassza ki a compliance parancsot a hatodik sorban.
-
Állítsa be a tulajdonság módját a következők szerint: A kikapcsolt üzemmód letiltja a megfelelőség ellenőrzését.
-
Üzemmód: Ki
-
-
Nyomja meg a jóváhagyás gombot.
-
Válassza ki a negyedik sorban a compliance parancsot.
-
Állítsa be a Mode (üzemmód) opciót a tulajdonságban a következők szerint: A bekapcsolt üzemmód lehetővé teszi a megfelelőség ellenőrzését.
-
Üzemmód: Be
-
-
A merevséget a következőképpen állíthatja be: Csökkentse az X és Y irányú merevséget a lágyabb reakciók érdekében X és Y irányban.
-
X: 200 N/m.
-
Y: 200 N/m.
-
Z: 3000 N/m (alapértelmezett)
-
RX, Ry, RZ: 200 Nm/rad (alapértelmezett)
-
-
Nyomja meg a jóváhagyás gombot.
-
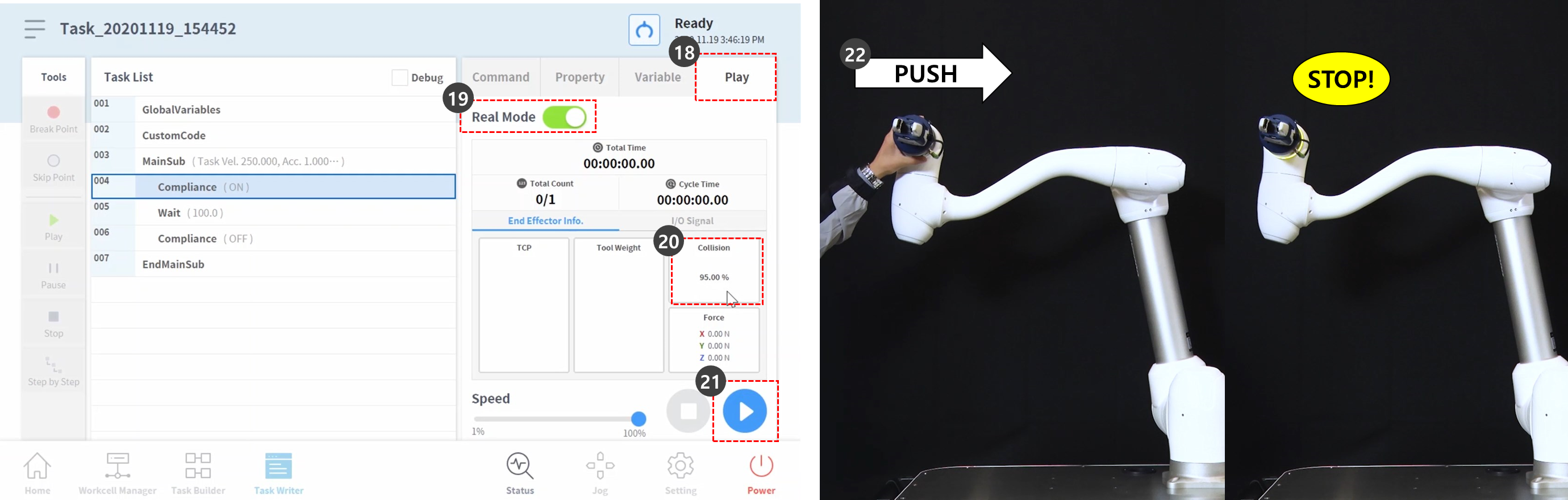
Válassza a Lejátszás fület.
-
Engedélyezze a Real Mode (valós mód) váltógombot.
-
A váltógomb bekapcsolása után a gomb zölden világít.
-
-
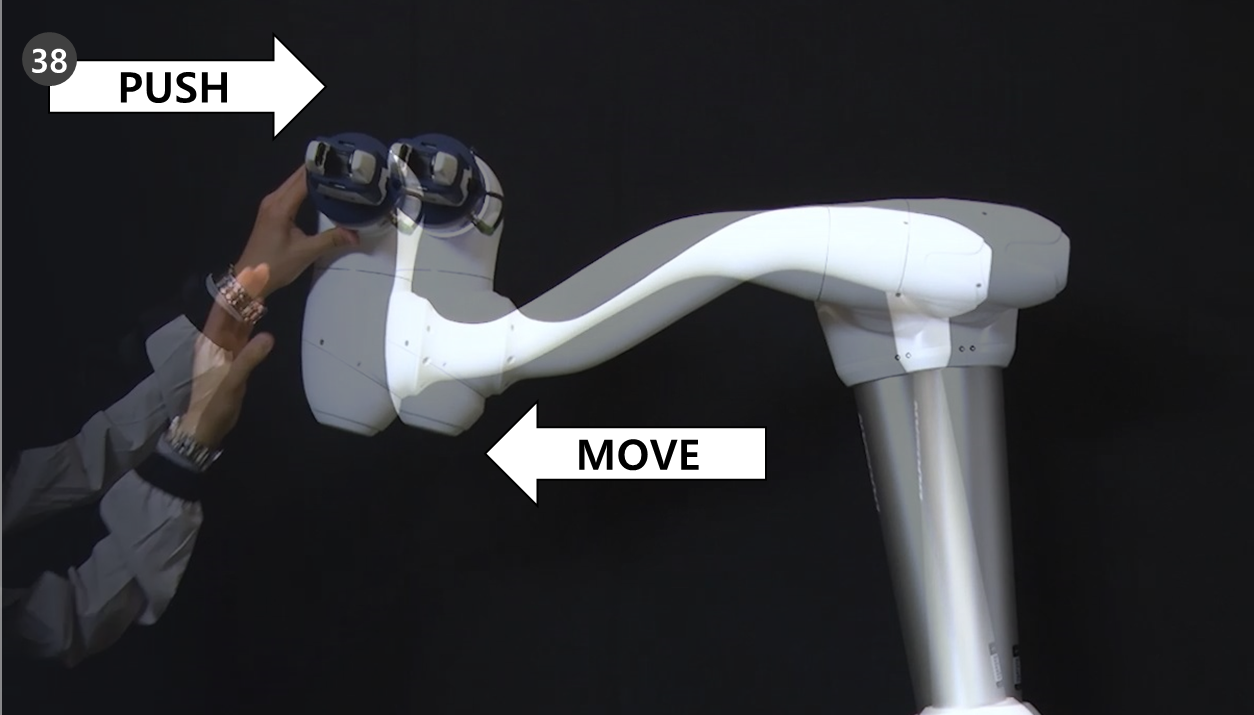
Ez a minta szándékosan aktiválja a biztonsági leállítást, hogy elmagyarázza az ütközés érzékenységének csökkentésére vonatkozó okot a megfelelőség ellenőrzése során. A minta ütközési érzékenysége 95%. Ilyen nagy ütközési érzékenység esetén a robot nagyon érzékenyen reagál az ütközésekre.
-
Ütközés esetén a robotot a biztonsági leállítás leállítja.
-
-
Nyomja meg a lejátszás gombot.
-
Tartsa meg a robot végét, és lassan nyomja a robot testirányába. A robot ütközési hiba miatt leáll. Az ütközés miatti biztonsági leállás során a robot LED-je sárgán világít.
-
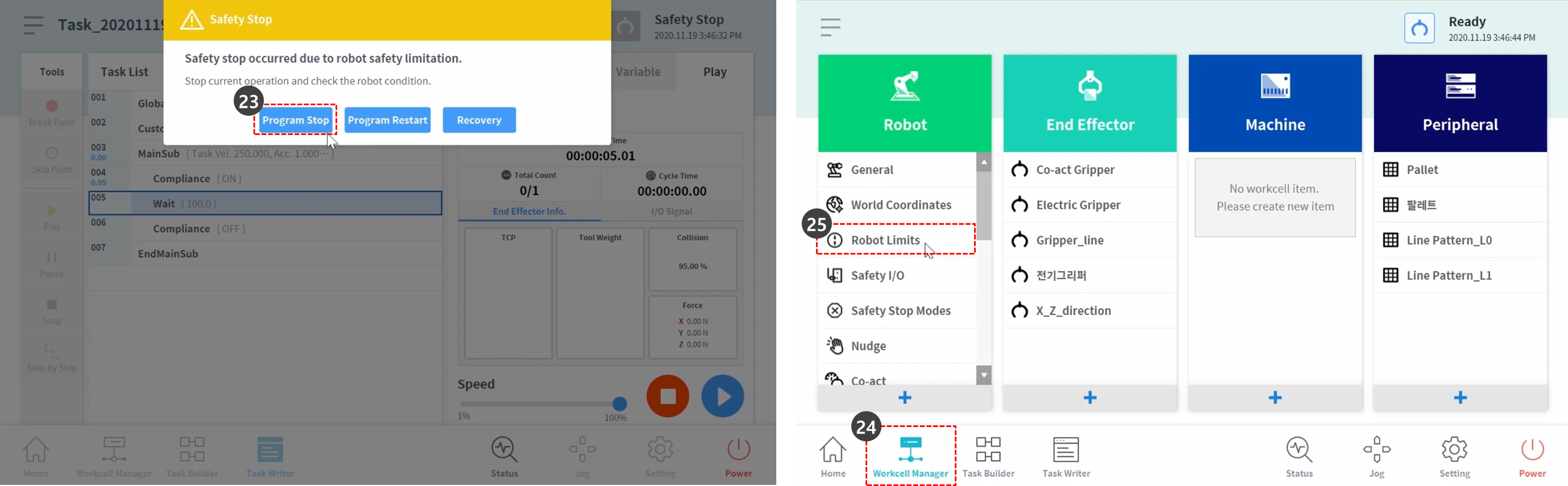
Nyomja meg a program Stop gombot a sárga biztonsági STOP figyelmeztető ablakban a képernyőn. A folyamatban lévő feladat program leáll.
-
Válassza ki a Workcell Manager (munkaállomás-kezelő) elemet az alsó menüből.
-
Válassza a Robot > Robot Limits (Robot >
-
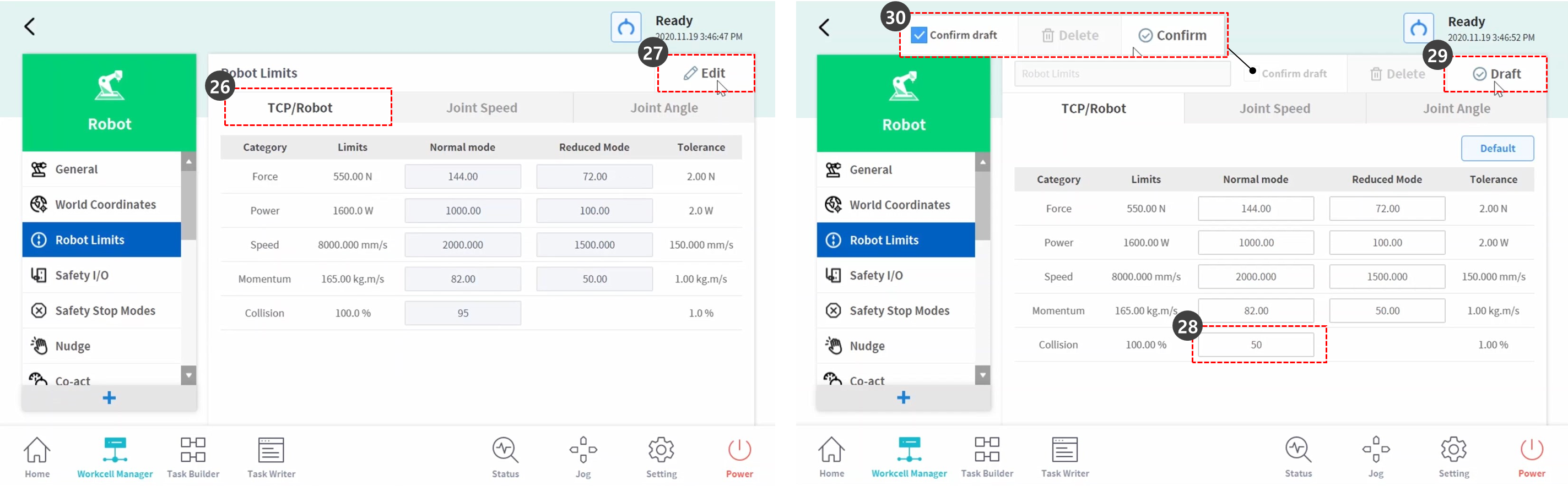
Válassza a TCP/Robot fület.
-
Nyomja meg a Szerkesztés gombot.
-
Állítsa be az ütközésérzékenységet a következőként:
-
Normál üzemmód: 50 %
-
-
Nyomja meg a Draft (vázlat) gombot.
-
Jelölje be a piszkozat megerősítése jelölőnégyzetet, majd nyomja meg a jóváhagyás gombot.
-
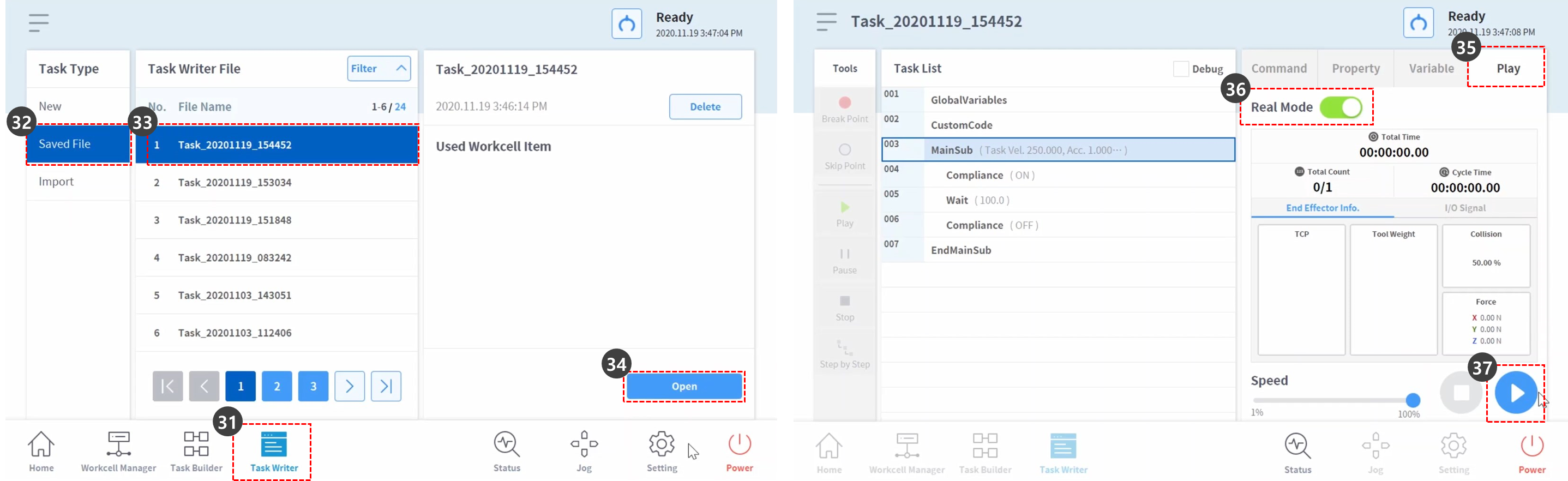
Válassza ki a Feladatírót az alsó menüből.
-
Válassza ki a mentett fájlt a képernyő bal oldalán.
-
A kiválasztása előtt ellenőrizze, hogy az első feladatfájl neve a 2. Lépésben szereplő feladatnév-e. Az utoljára mentett feladat a Feladatíró fájllista tetején található.
-
Nyomja meg a Megnyitás gombot.
-
Válassza a Lejátszás fület.
-
Engedélyezze a Real Mode (valós mód) váltógombot.
-
Nyomja meg a lejátszás gombot.
-
Tartsa meg a robot végét, és lassan nyomja a robot testirányába. A robot a nyomóerő hatására elmozdul, és visszatér eredeti helyzetébe.