Le forme di Limiti di spazio / Zona sono impostate come segue:
|
Voce |
Descrizione |
|---|---|
|
Cuboid |
La forma di Limiti di spazio / Zona è impostata come un cuboide.
|
|
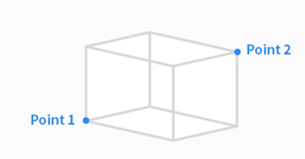
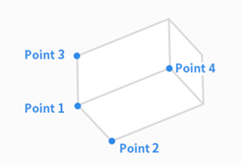
Tilted Cuboid |
La forma di Limiti di spazio / Zona è impostata come un cuboide inclinato. Impostazione di 4 punti
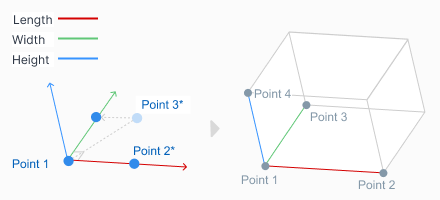
Impostazione per 3 punti e altezza Immettere il punto di riferimento (Punto 1), il punto sull'asse x (Punto 2) e il punto sul piano xy (Punto 3).
Dopo aver determinato il punto di riferimento e le direzioni dei tre assi, è possibile specificare la dimensione del cuboide inclinato impostando lunghezza, larghezza e altezza. Il cuboide inclinato può essere spostato parallelamente (traslazione parallela) impostando l'offset x, y e z.
|
|
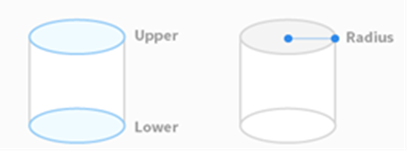
Cylinder |
La forma di Limiti di spazio / Zona è impostata come un cilindro.
|
|
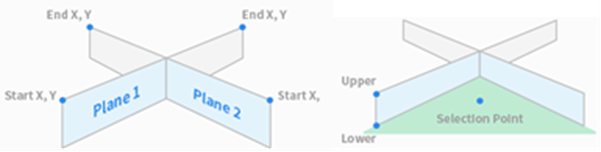
Multi-plane Box |
La forma di Limiti di spazio / Zona è impostata come un box multi-piano.
|
|
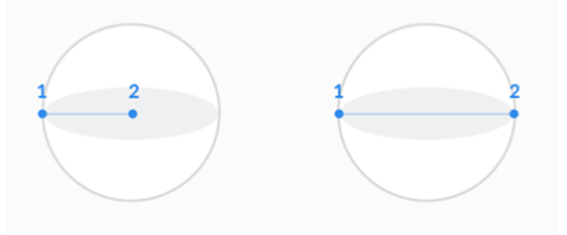
Sphere |
La forma di Limiti di spazio / Zona è impostata come una sfera.
|