必填 正常 20 分钟

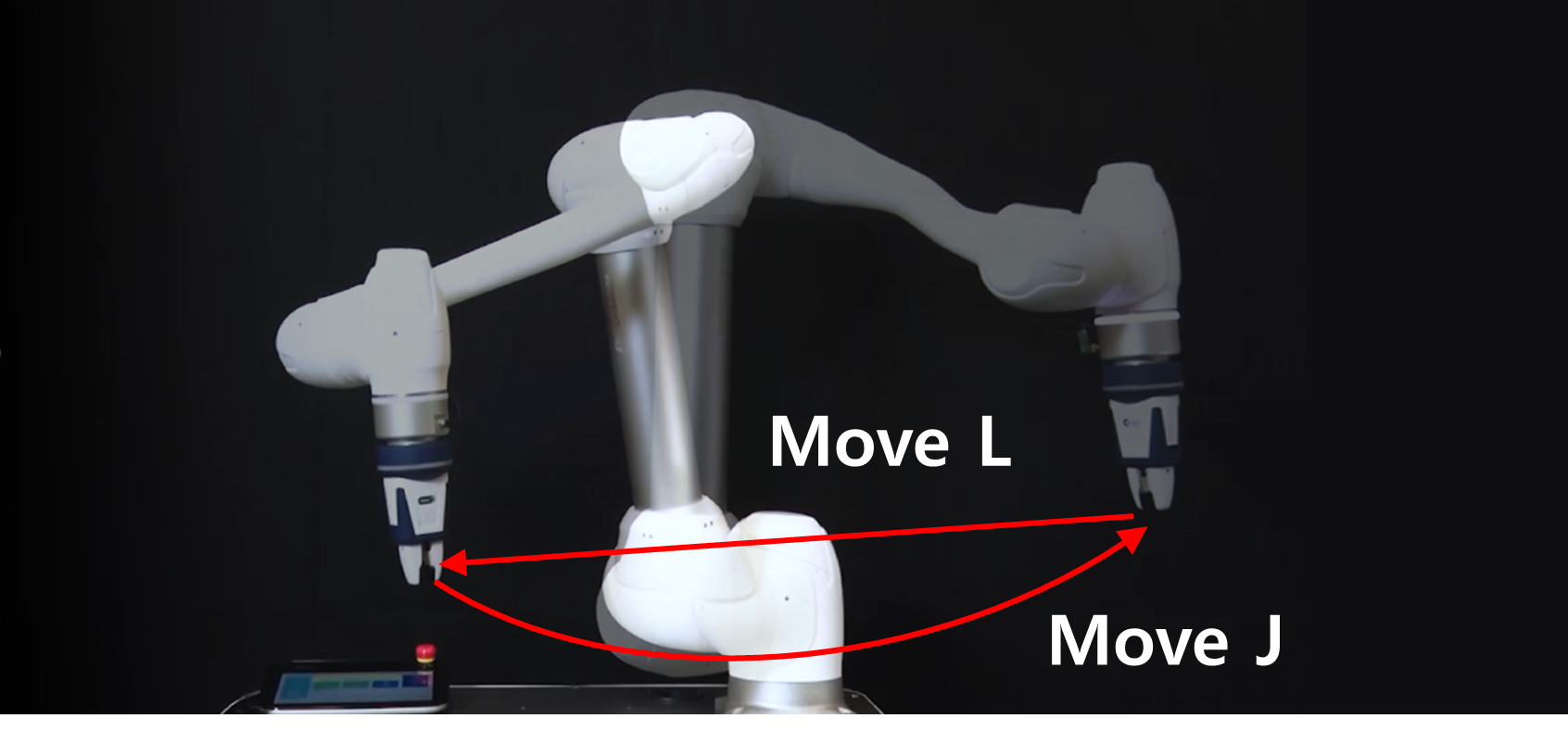
在此示例中,在任务生成器中添加 MoveJ 和 MoveL 命令,执行它们并比较两个动作之间的差异。
小心
-
在尝试样本之前,请确保阅读并遵循 (2.12-zh_CN) 使用注意事项。有关详细信息,请参阅 (2.12-zh_CN) 第 1 部分 .安全手册。
-
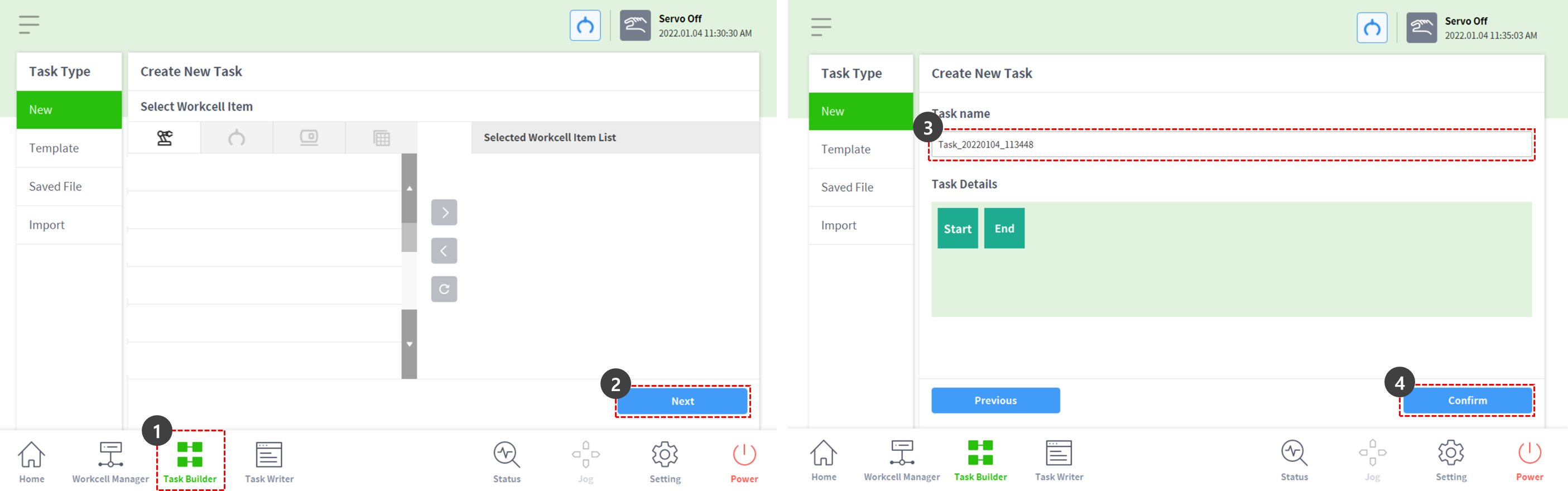
从屏幕底部的栏中选择任务构建器。
-
任务编写器中的编程方法与任务生成器的编程方法几乎相同。
-
-
按“ Next (下一步) ”按钮。
-
要创建包含已注册工作单元项目 (如夹具) 的程序,必须添加工作单元项目。
-
在此示例中,按下“下一步”按钮,而不选择任何工作单元项目和技能。
-
-
输入任务名称。
-
按确认按钮。
-
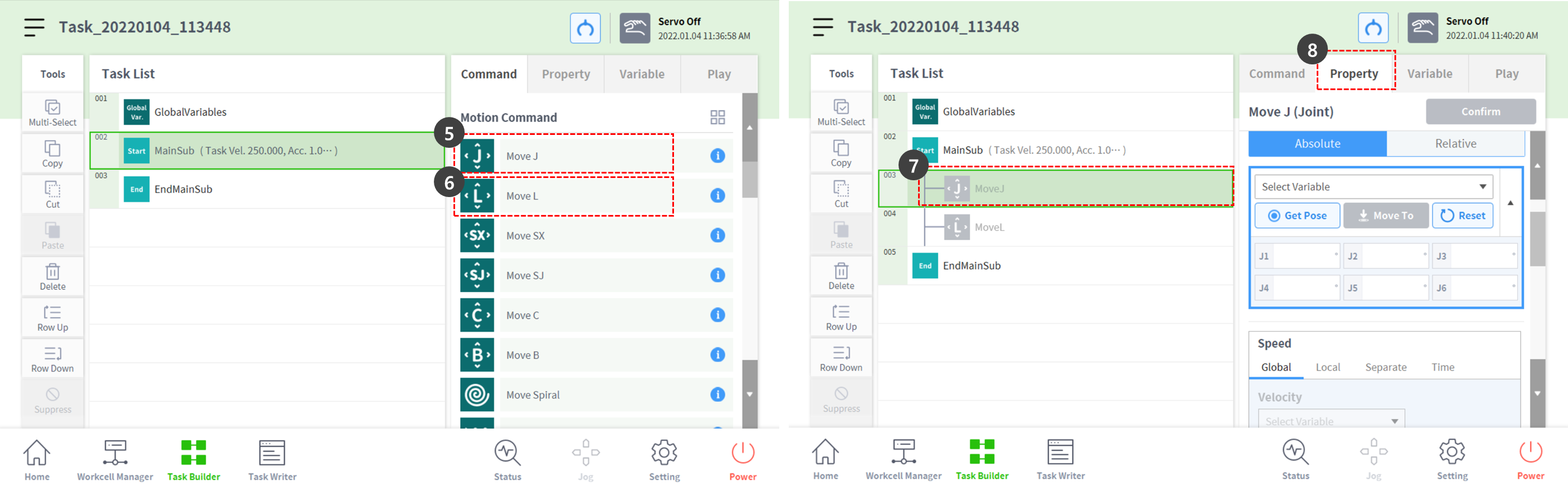
选中第二行上的 MainSub 后,按 MoveJ 将 MoveJ 命令添加到任务列表中。
-
命令将添加到选定命令的下一行。
-
-
按 MoveL 将 MoveL 命令添加到任务列表中。
-
在任务列表的第三行选择 MoveJ。
-
选择右上角的属性选项卡。可以在属性选项卡中设置命令的属性值。
-
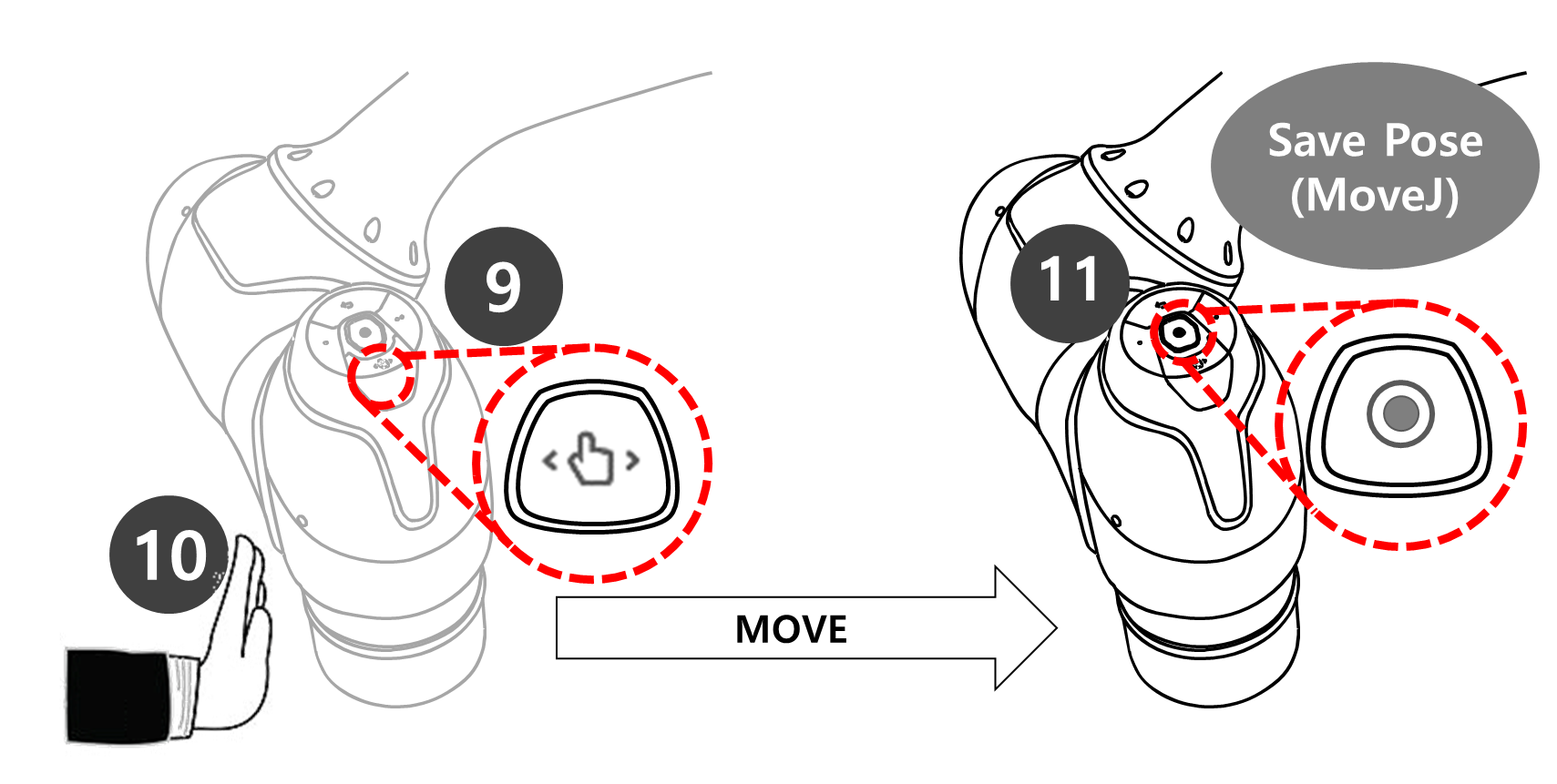
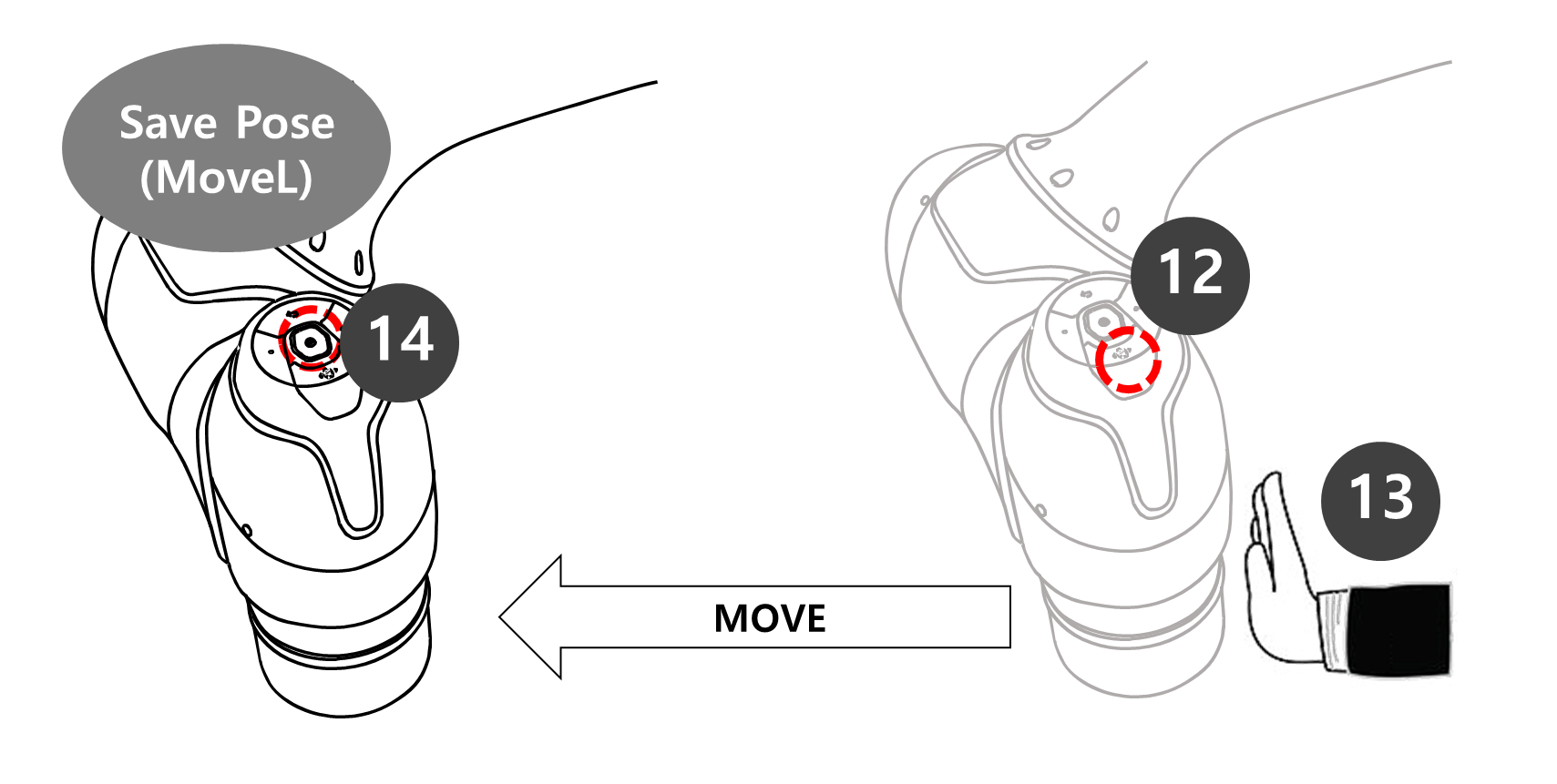
用一只手按住机械手末端顶部驾驶舱上的手动导向按钮 (具有手形)步骤 9 至 11 保存 MoveJ 的姿势。
-
如果机器人无法使用驾驶舱,请查看下面的“注意”。
-
-
用另一只手将机械手推至安全位置。
-
松开手动导向按钮并按下保存姿势按钮。
-
用一只手按住机械手末端顶部驾驶舱上的手动导向按钮 (具有手形)步骤 12 至 14 保存了 MoveL 的姿势。
-
无需选择任务列表的 MoveL。如果按下了保存姿势按钮,任务列表将自动移至任务行。
-
-
用另一只手将机械手推至安全位置。
-
松开手动导向按钮并按下保存姿势按钮。
-
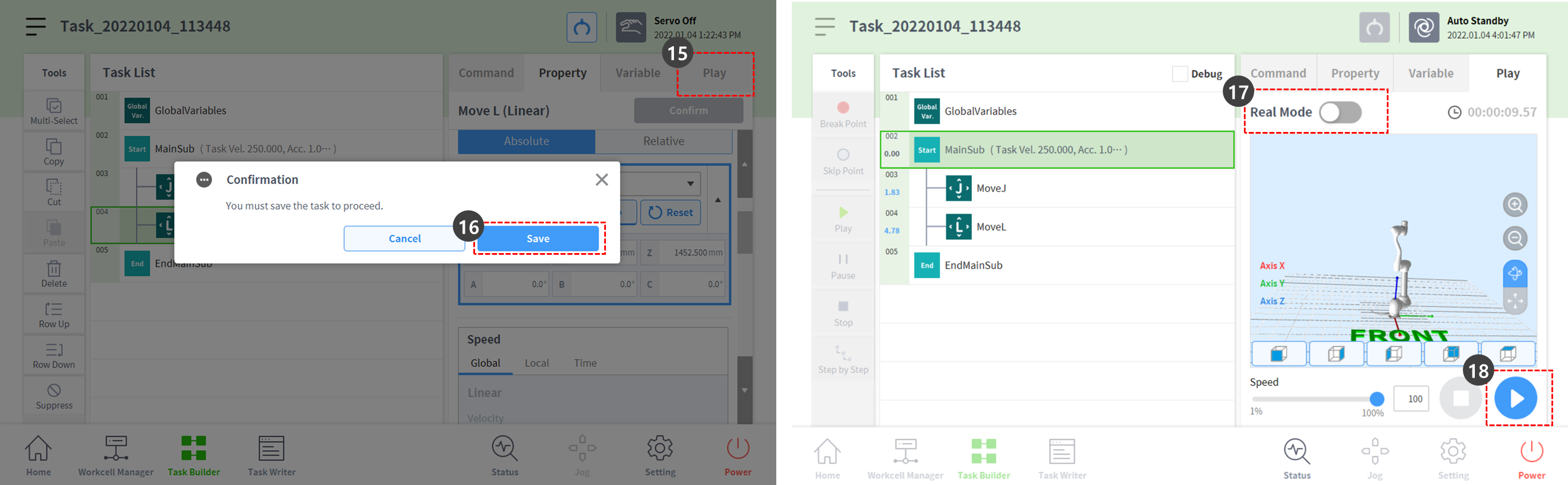
按播放选项卡执行任务。
-
由于任务未保存,将显示一个弹出窗口,要求保存任务。按 Save (保存)。
-
将实模式切换按钮设置为禁用状态 (灰色)。
-
如果禁用了实模式,机械手不会移动,并且只有屏幕模拟器中的虚拟机械手会移动。
-
执行任务之前,建议在此模拟模式下测试任务。
-
-
按右下方的播放按钮。
-
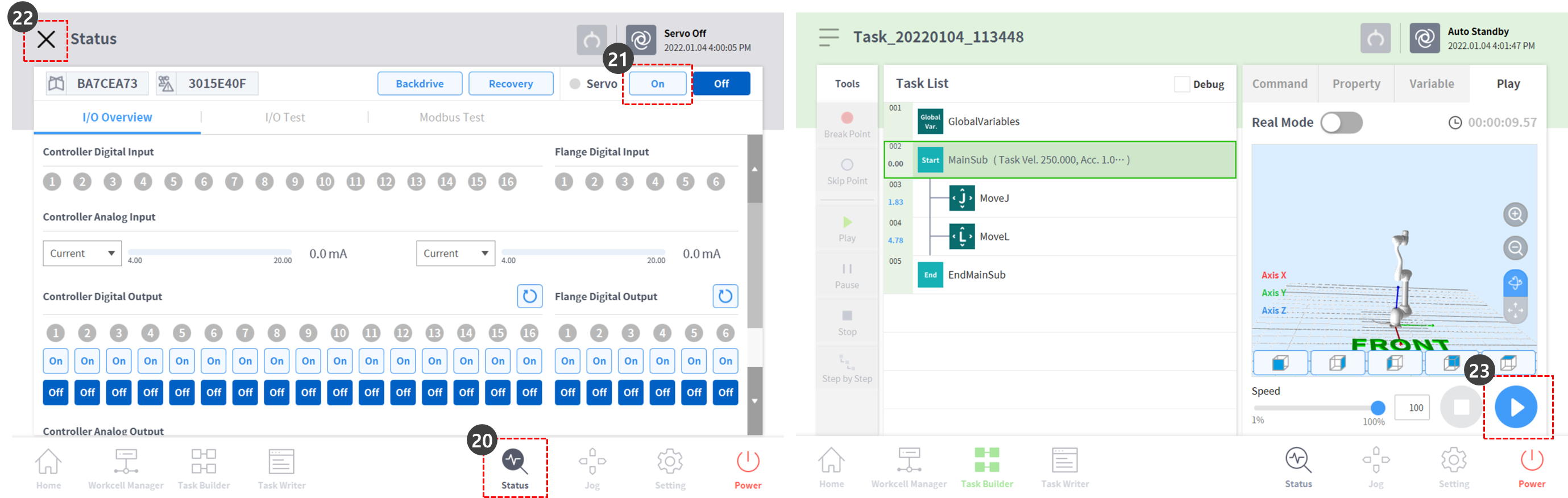
显示一条错误消息,指出机械手未就绪。按 X 按钮关闭弹出窗口。

-
机械手只能在伺服打开状态下移动。
-
通过状态 > 伺服可以打开和关闭机械手的伺服打开和伺服关闭 。
-
-
要将机械手设置为就绪状态,必须将机械手设置为伺服打开。选择底部栏上的状态。
-
按下伺服打开按钮。
-
按左上角的 X 关闭“ Status (状态) ”窗口。
-
再次按下右下方的播放按钮。机械手将在模拟器中成功移动。
-
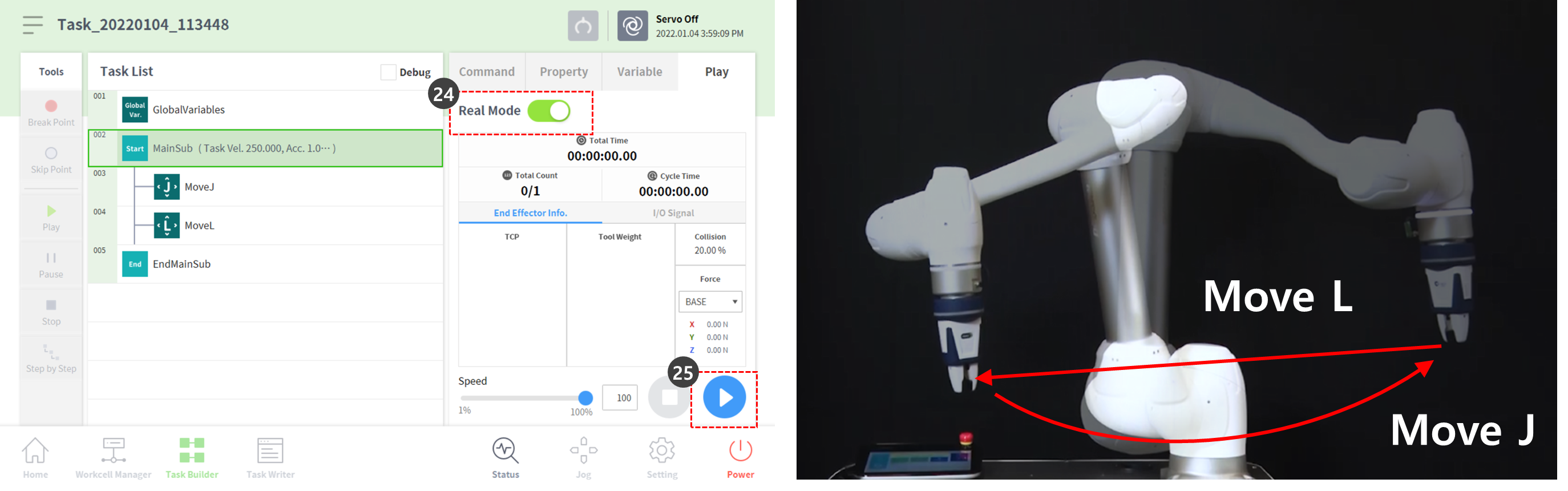
将实模式切换按钮设置为启用状态 (绿色) 以操作实际机械手。
-
按右下方的播放按钮。实际机械手将成功移动。
注
驾驶舱的“保存姿势”按钮在“标定手控盒”屏幕上以相同的顺序执行以下功能。
-
按 属性 > 获取姿势 按钮加载当前姿势信息。
-
按 确认 按钮保存命令属性中的更改。
-
选择下一个命令。
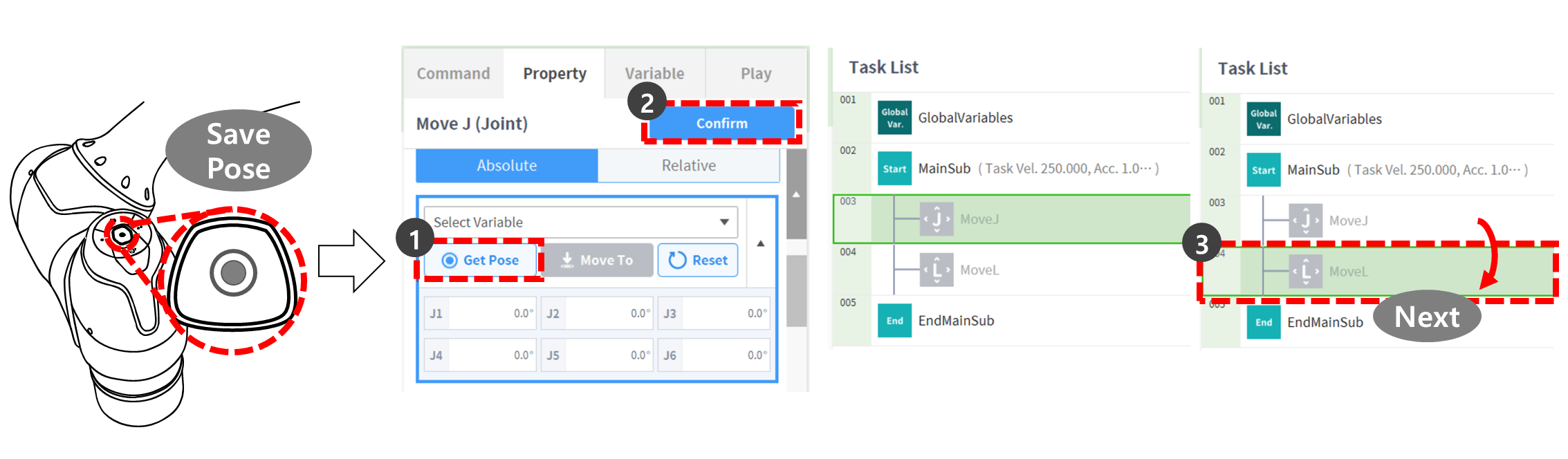
通过这样做,可以通过同时向任务列表添加多个动作命令,移动机械手同时按下驾驶舱上的手动导向按钮和“ Get P姿势 ”按钮来快速设定任务。