必填 简单 3 分钟
-
编程前,必须使用工作单元管理器完成安全设置,安装姿势和工具设置。有关详细信息,请参阅 步骤 3.机械手操作和设置。
-
在循环内过度使用 TP_LOG 或 SET 命令可能会导致 CPU 过载。
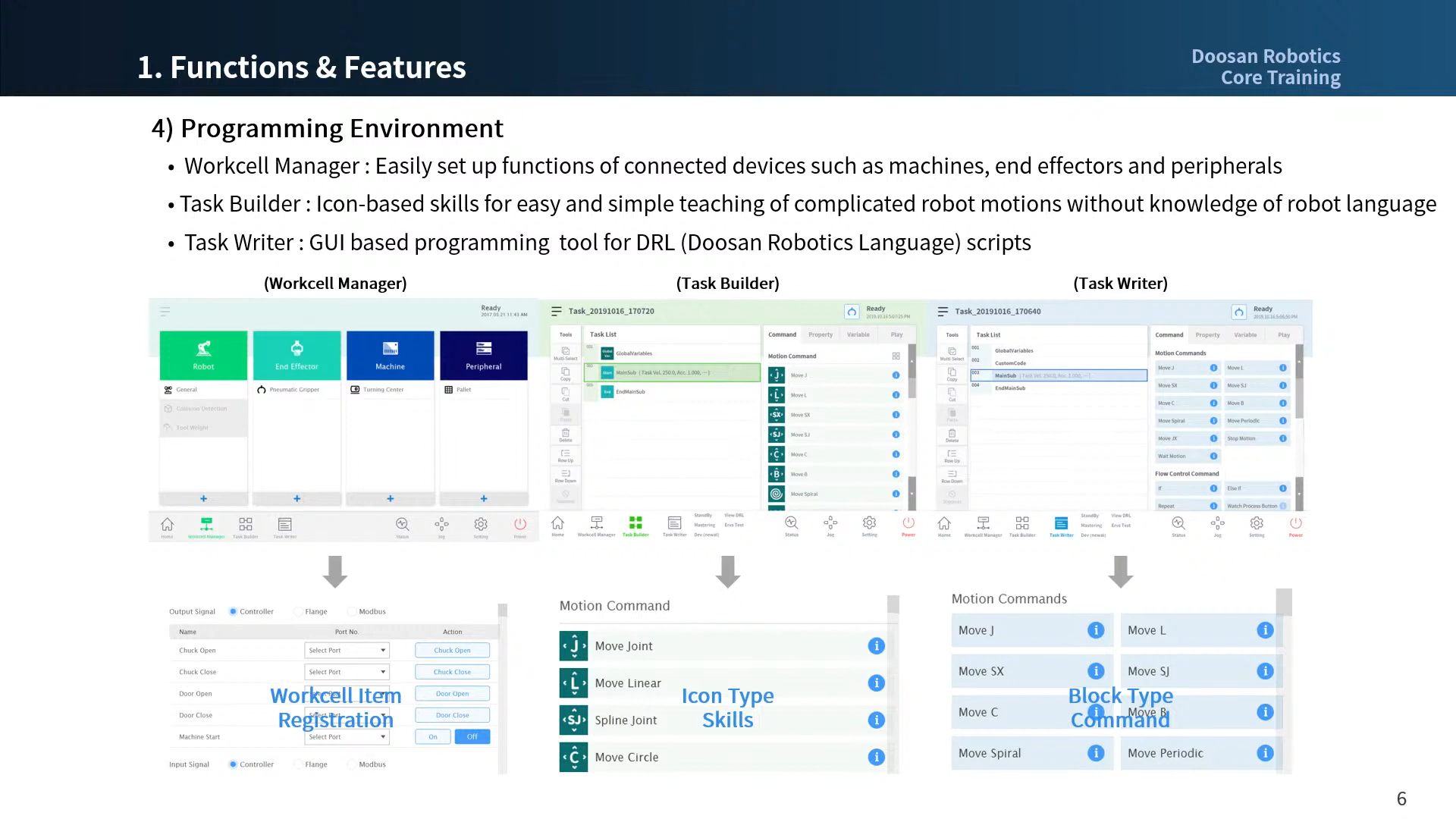
斗山机器人提供两种类型的任务编程环境。
-
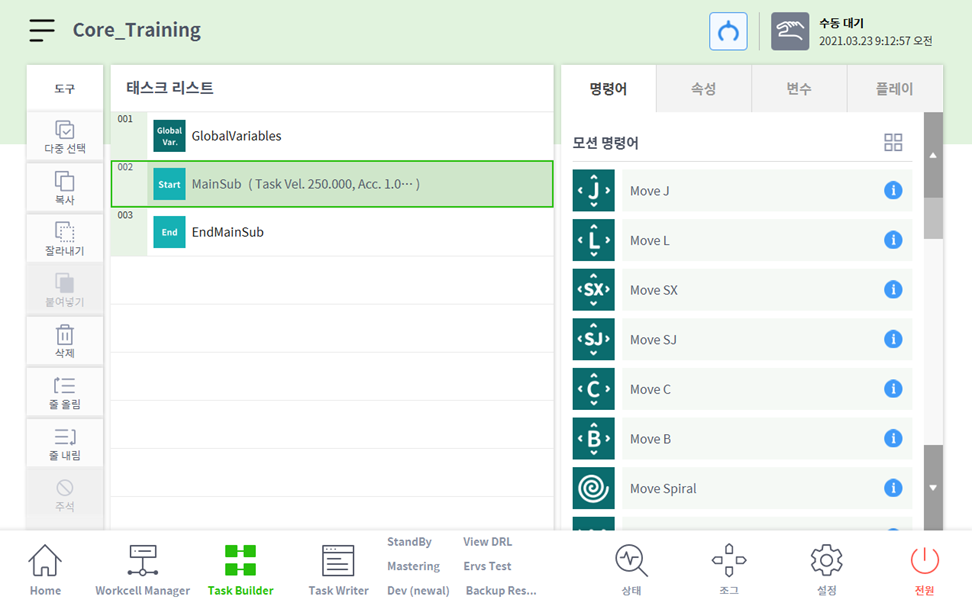
任务构建器:它是一个基于图标块的编码环境,利用命令和技能图标。根据在 Workcell Manager 上注册的工作单元项目,支持技能。
-
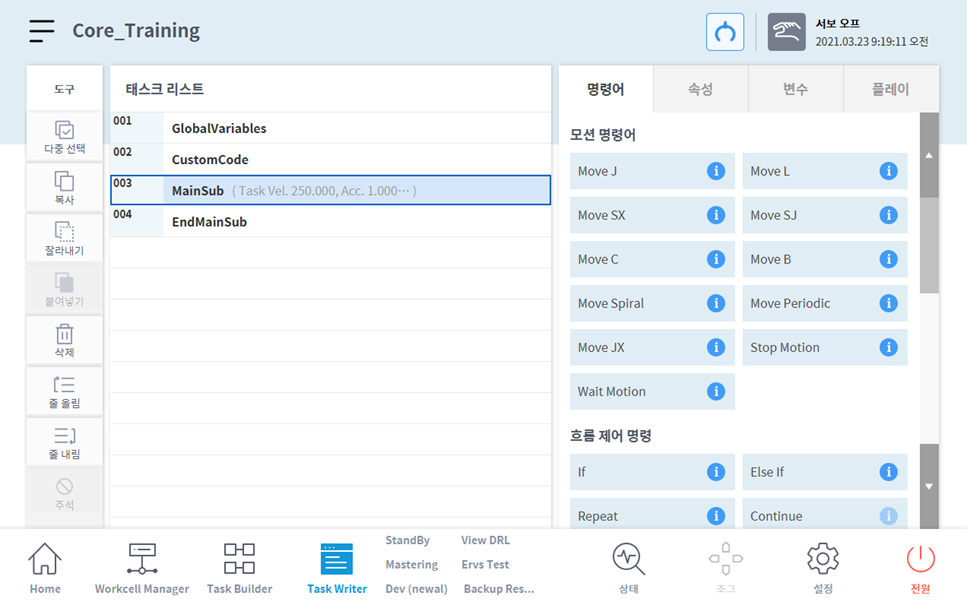
任务编写器:它是一个基于块的编码环境,利用基于脚本的编程,可以轻松地输入到线控器
这两种编程环境之间的区别如下:通常,希望使用技能的新手用户或用户使用任务构建器。不希望使用技能的中间用户使用任务编写器进行快速编程。
|
|
分类 |
任务构建器 |
任务编写器 |
|---|---|---|---|
|
1. |
主题 |
需要使用技能的新手用户或用户 |
中间用户 |
|
2. |
基于块的编码 |
o |
o |
|
3. |
使用命令图标 |
o |
X |
|
4. |
技能支持 |
o |
X |
|
5. |
屏幕 |
|
|
斗山机器人的技能是什么?
-
这是一个命令,通过将进程中所需的各种命令与单个设置捆绑在一起,配置界面以方便使用。
-
它只能在“任务构建器”中使用,并且每个 skill 都显示为单个块。例如,“任务构建器”图标块用于选择技能和位置 skil ,如下所示:
