ワールド座標を基準としてロボットを移動するには:
-
移動タブを選択した後、タスクタブを選択してください。
-
表示座標系をワールドに選択した後、ワールドタブを選択してください。
-
移動しようとするポーズをワールドを基準として設定してください。
-
該当ポーズに移動ボタンを長押しして、設定した座標に移動してください。
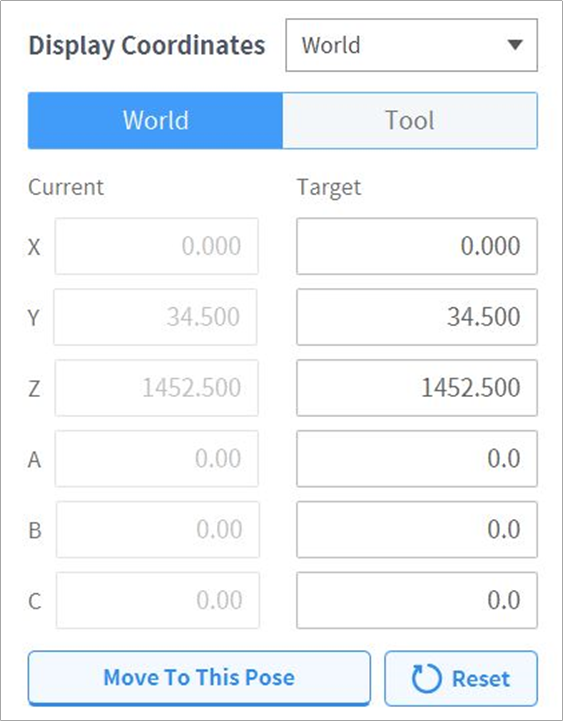
ワールド座標を基準としてロボットを移動するには:
移動タブを選択した後、タスクタブを選択してください。
表示座標系をワールドに選択した後、ワールドタブを選択してください。
移動しようとするポーズをワールドを基準として設定してください。
該当ポーズに移動ボタンを長押しして、設定した座標に移動してください。