特定角度でロボットを移動させるには:
-
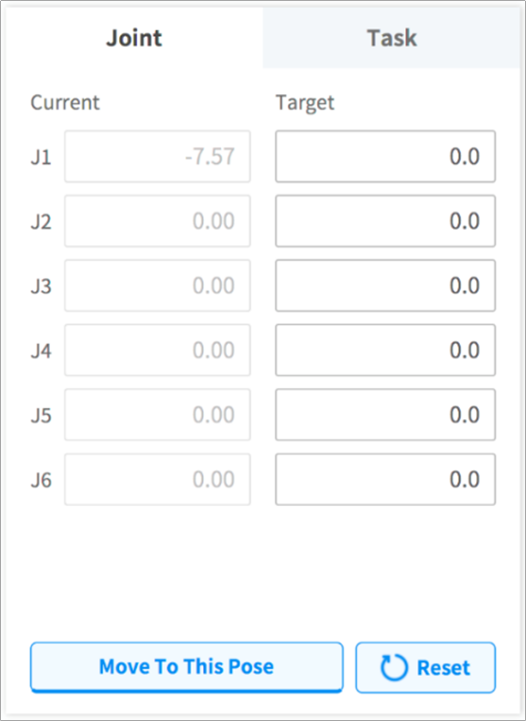
Moveタブを選択した後、Jointタブを選択してください。
-
ロボットジョイントの目標角度を入力してください。
-
Real modeを活性化してください。

-
Go to Poseボタンを長押しして、ロボットのジョイント角度を調節してください。
特定角度でロボットを移動させるには:
Moveタブを選択した後、Jointタブを選択してください。
ロボットジョイントの目標角度を入力してください。
Real modeを活性化してください。
Go to Poseボタンを長押しして、ロボットのジョイント角度を調節してください。