ロボットのベース座標を基準としてロボットを移動させるには:
-
Moveタブを選択した後、Taskタブを選択してください。
-
表示座標系をベースに選択した後、ベースタブを選択してください。
-
移動しようとするポーズをベースを基準として設定してください。
-
Move to Corresponding Poseボタンを長押しして、設定した座標に移動してください。
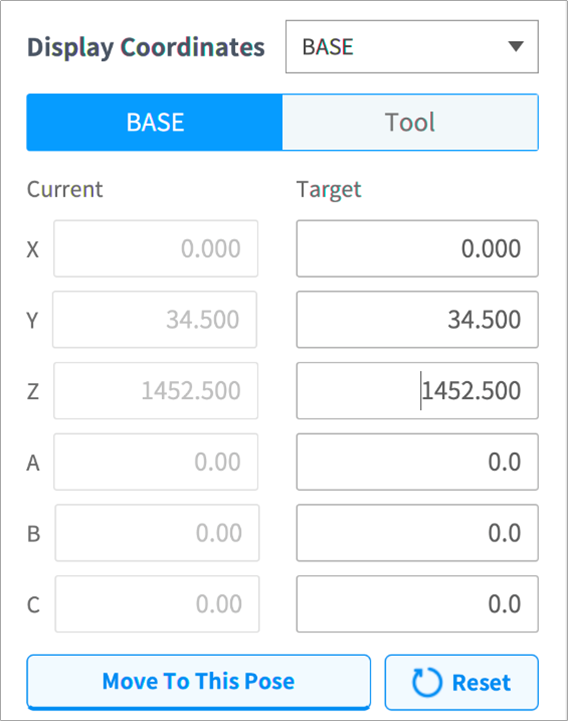
ロボットのベース座標を基準としてロボットを移動させるには:
Moveタブを選択した後、Taskタブを選択してください。
表示座標系をベースに選択した後、ベースタブを選択してください。
移動しようとするポーズをベースを基準として設定してください。
Move to Corresponding Poseボタンを長押しして、設定した座標に移動してください。