|
No. |
Elemento |
Descripción |
|---|---|---|
|
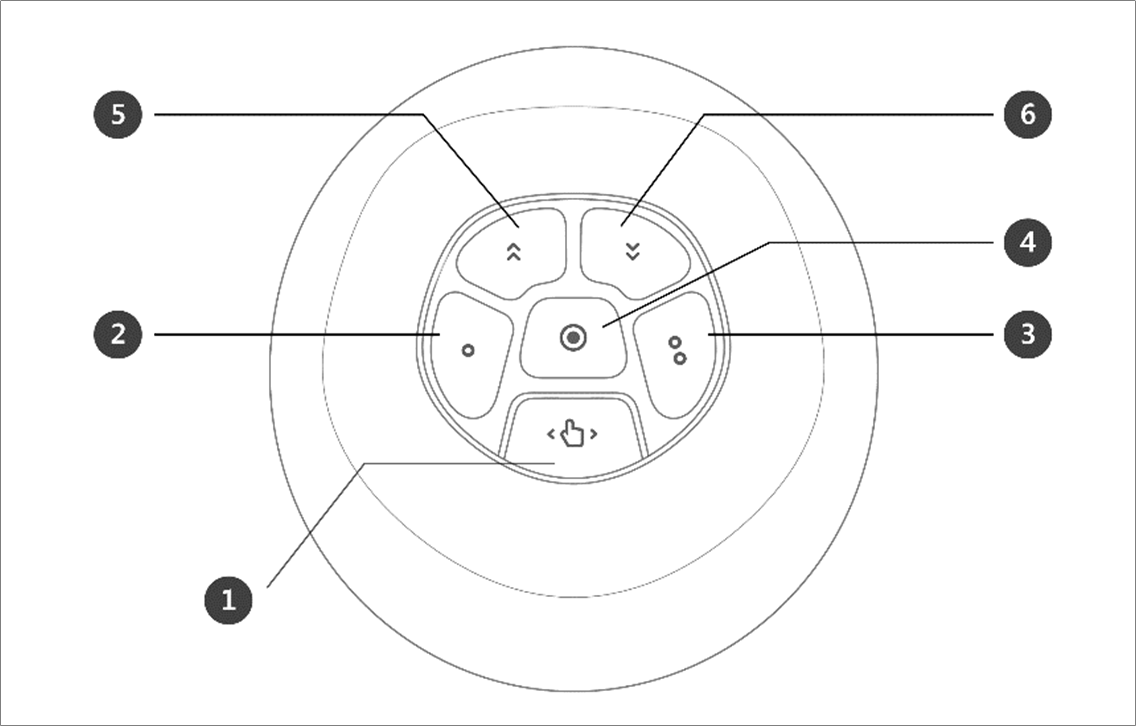
1 |
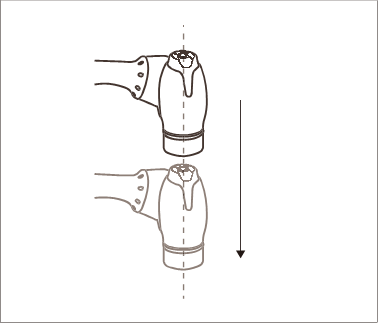
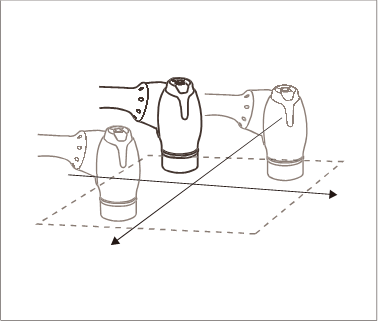
Hand-Guiding Button |
Este botón se puede utilizar para ajustar o cambiar la postura del robot. |
|
2,3 |
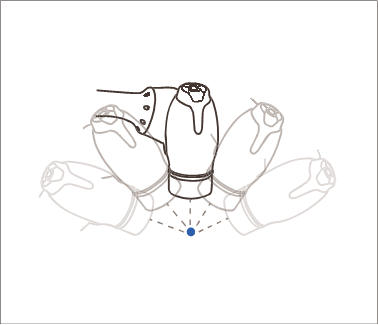
Pulsante di impostazione utente (movimento vincolato) |
Este botón puede modificar la postura del robot ingresando una postura de acuerdo con una condición de bloqueo correspondiente a un modo.
Para obtener más información acerca de las configuraciones, consulte “(2.12.2-es) Configuración de cabina”. |
|
4 |
Save Pose Button |
Guarda la postura actual del robot. Para obtener más información, consulte “(2.12.2-es) Configuración del punto de trabajo del comando de habilidades con botones de cabina”. |
|
5 |
One Line Up |
Mueve el enfoque que se muestra en la pantalla una línea hacia arriba |
|
6 |
One Line Down |
Mueve el enfoque que se muestra en la pantalla una línea hacia abajo |
Nota - Cambio de configuración de cabina
-
Per modificare le impostazioni del



-
Presionando el botón Guardar postura en la pantalla de configuración de habilidades, el enfoque se moverá automáticamente a la siguiente postura.
-
El botón cancelar solo se puede usar en la ventana de configuración de habilidades que administra las múltiples posturas.
Precaución
-
I modelli della serie A senza FTS (A0509, A0912) non possono utilizzare il pulsante di impostazione utente (movimento vincolato).
-
I modelli della serie A con FTS (A0509S, A0912S) sono in grado di utilizzare il pulsante di impostazione utente (movimento vincolato).
-
El movimiento fijo depende del FTS conectada a la punta del robot; por lo tanto, resulta esencial conectar la herramienta y que el robot agarre mientras se mueve. Mover el robot mientras se sostiene el cuerpo puede no activar una reacción por parte del robot.
-
Para obtener detalles acerca de los límites funcionales de cada serie de robots, consulte «(2.12.2-es) Límites funcionales de cada serie de robots».