시너직(Synergic)방식의 용접기와 EtheNet/IP 통신을 통해 로봇과 용접기의 양방향의 설정 및 신호를 전송하며 연동할 수 있습니다. 각 용접기별로 제공하는 기능과 이에 대한 시그널 설정 정보가 다르며 ‘용접기 인터페이스 설정’ 메뉴에서는 용접기별로 제공하는 다양한 용접조건, 연동 신호 및 모니터링 정보를 범용적인 UI를 통해 설정하여 사용하도록 합니다.
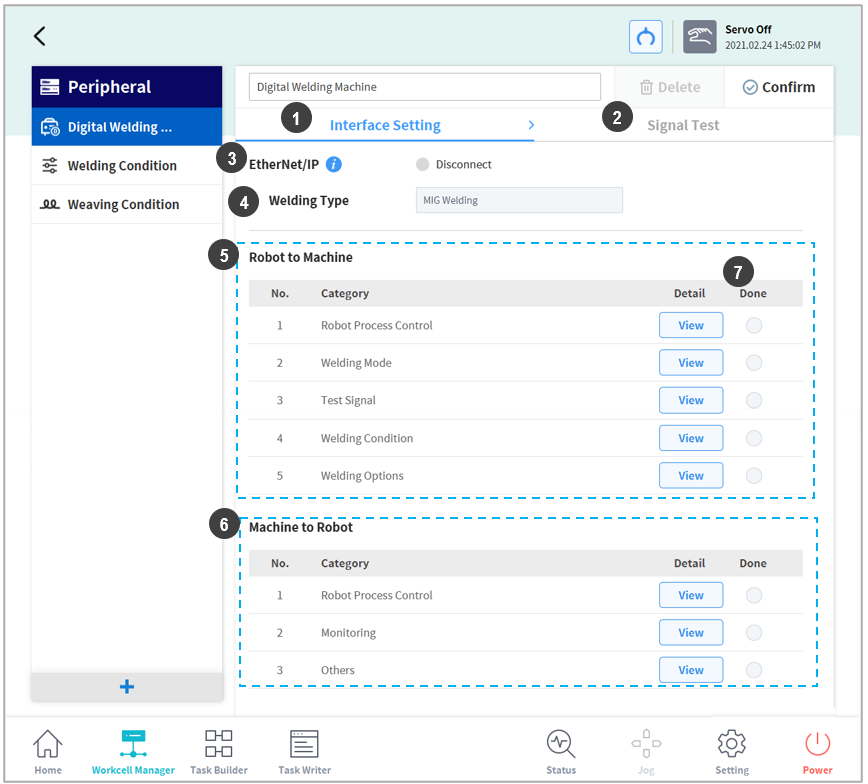
‘인터페이스 설정’ 메뉴에서 설정 및 활성화한 신호들은 용접조건, 용접작업설정 등의 관련 기능에 연동되므로 가장 먼저 설정되어야 합니다. 아크용접 개요의 물리적인 인터페이스 설정을 완료한 후, Workcell Manager → Peripheral → Welding의 메뉴에서 아래의 설명을 따라 설정을 진행합니다.
|
번호 |
항목 |
설명 |
|---|---|---|
|
1 |
인터페이스 설정 탭 (Interface Setting) |
로봇과 용접기 간의 인터페이스를 설정합니다. 필수 설정 항목이 포함된 그룹은 반드시 저장이 완료되어야 합니다. |
|
2 |
신호 테스트 탭 (Signal Test) |
인터페이스 설정 탭에서 설정한 값을 바탕으로 설정한 신호들의 테스트를 수행합니다. Robot to Machine의 Robot Process Control, Test Signal 항목과 Machine to Robot의 Robot Process Control 항목의 설정이 완료되어야 진입할 수 있습니다. |
|
3 |
EtherNet/IP 연결 상태 |
로봇과 용접기간의 EtherNet/IP 연결 상태를 표시합니다.
|
|
4 |
용접 타입 |
용접기에 따른 용접공법을 표시합니다. (S/W V2.8에서는 EtherNet/IP 통신방식의 MIG/MAG/CO2 용접기를 지원합니다.) |
|
5 |
로봇에서 용접기로의 신호 (Robot to Machine) |
로봇에서 용접기로 보내는 신호들을 설정합니다. |
|
6 |
용접기에서 로봇으로의 신호 (Machine to Robot) |
용접기에서 로봇으로 보내는 신호들을 설정합니다. |
|
7 |
설정 완료 |
설정 완료된 항목을 표시합니다. |