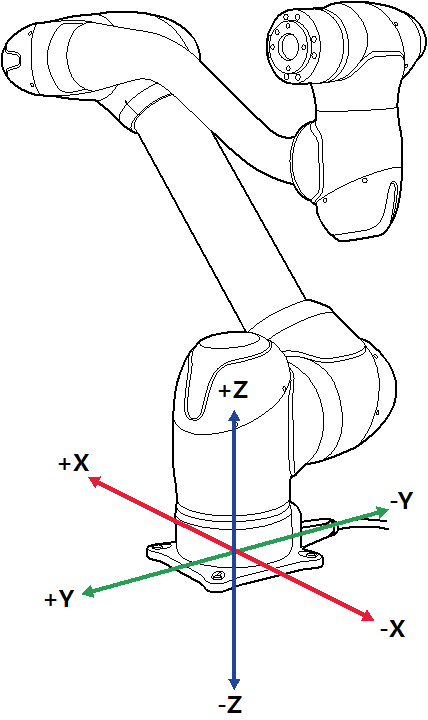
Para mover o robot em relação à base do robot
-
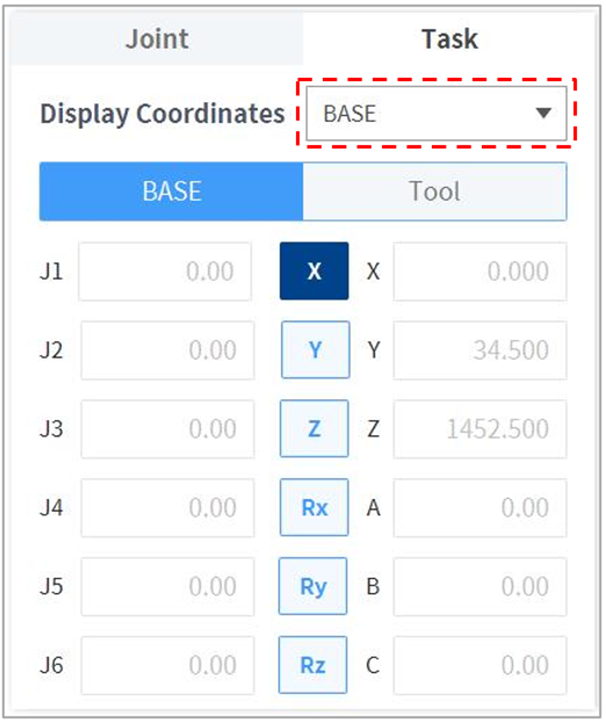
Selecione a guia Tarefas na tela Jog.
-
Selecione Exibir Sistema de Coordenadas como Base e depois Base como Ponto de Referência do Sistema de Coordenadas de Tarefas.
-
Selecione o sistema de coordenadas base que pretende mover.
-


Saber
A zona de segurança não é aplicável no modo virtual.