Para mover o robô em relação às coordenadas mundiais:
-
Selecione a guia Mover e a guia Tarefas.
-
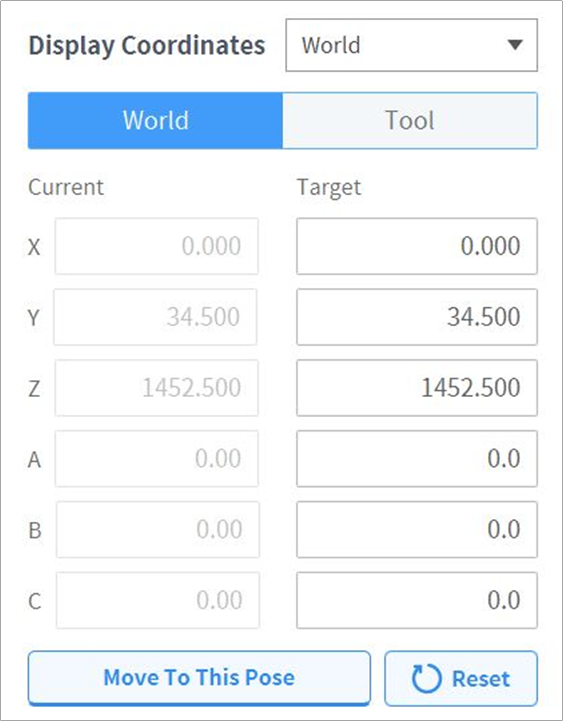
Selecione Mundo para Sistema de Coordenadas de Visualização e, em seguida , selecione o separador Mundo
-
Defina a posepara a qual pretende passar com base nos padrões mundiais.
-
Toque e mantenha premido o botão Mover para pose para se mover para as coordenadas que definiu