Para ajustar o ângulo relativamente à junta do robot:
-
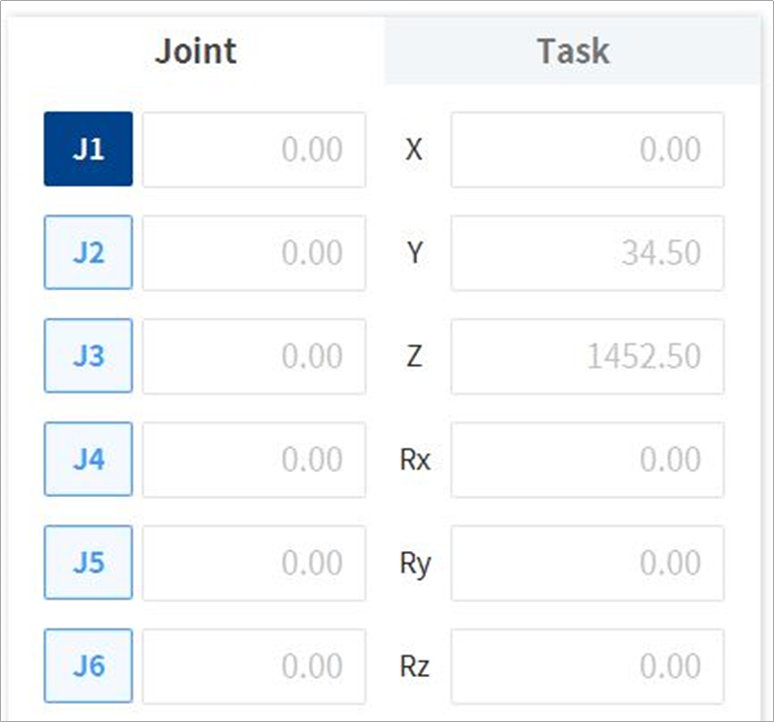
Selecione o separador Joint (Conjunto) no ecrã Jog(Registo).
-
Selecione o eixo para ajustar o ângulo (J1-J6).
-
Saber
A zona de segurança não é aplicável no modo virtual.