|
No. |
Item |
Description |
|---|---|---|
|
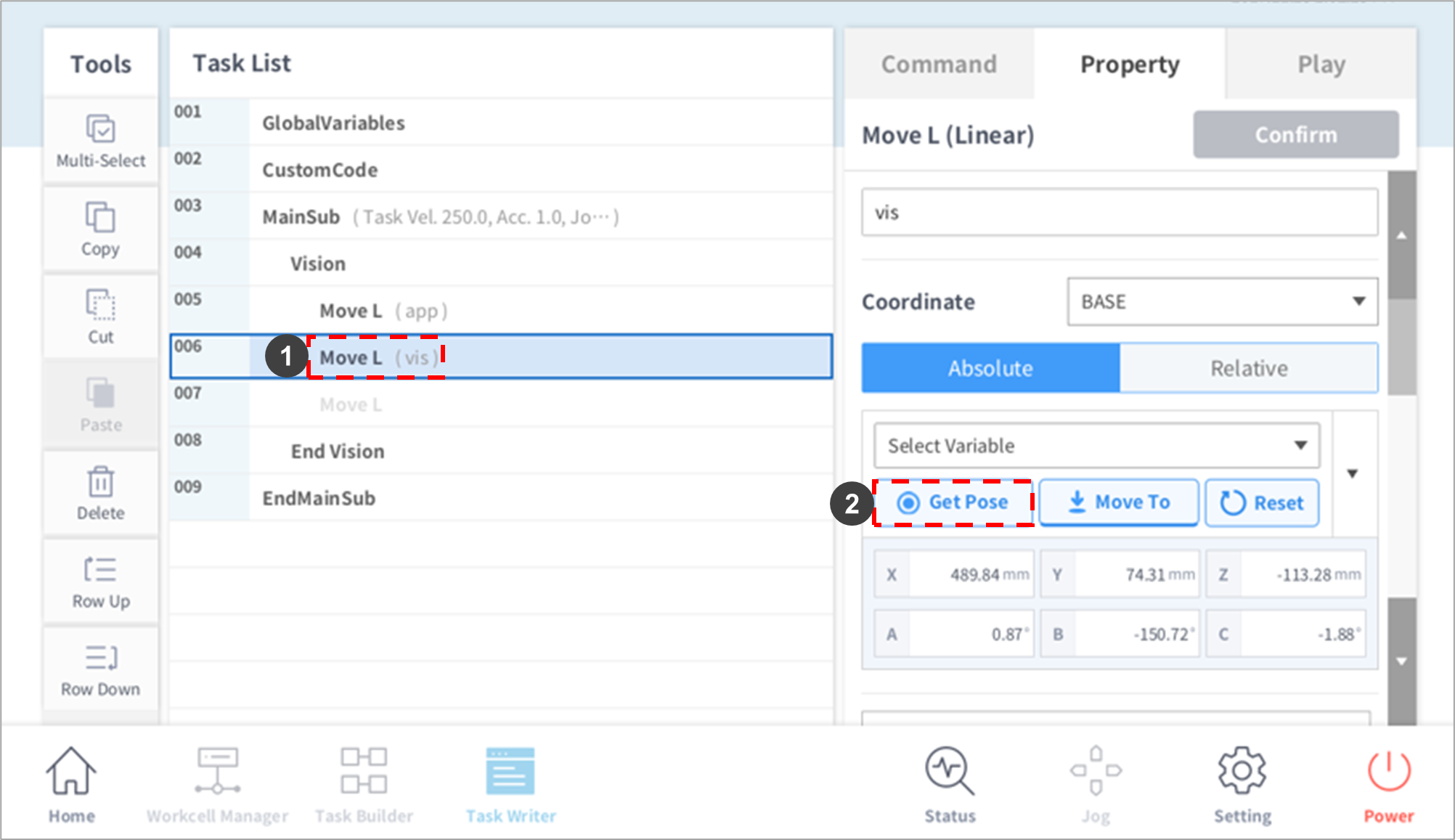
1 |
Add Motion Command after Vision Shoot and before Teaching Position Entry |
Enter the desired robot position with Move L. |
|
2 |
Get pose |
Acquires the pose after moving the pose to pick based on the Vision Pose using direct teaching. |
|
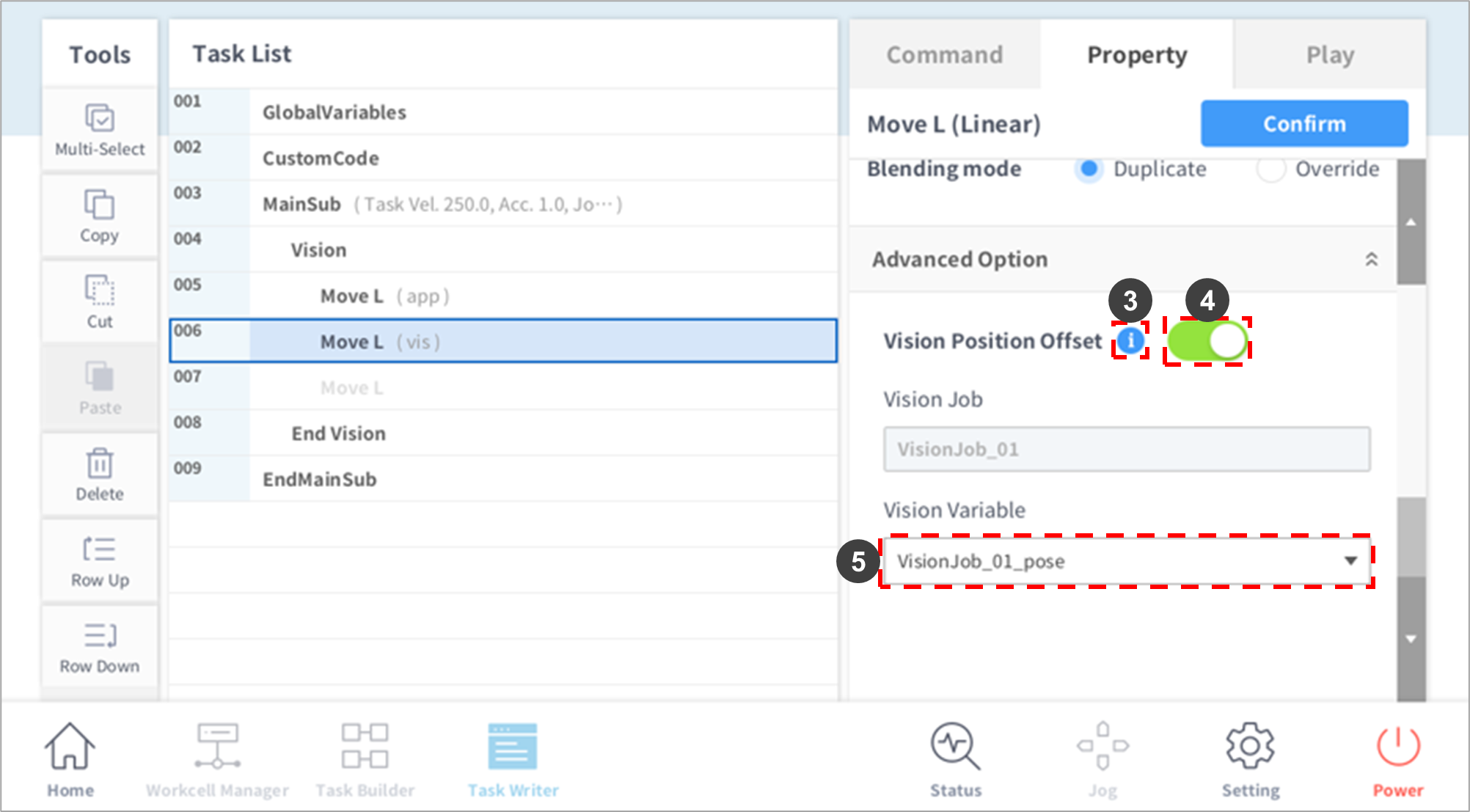
3 |
Add Motion Command for Vision Offset Pose |
If you insert a Motion Command (Move L, Move B, etc.) between Vision and End Vision in the Task List, a toggle button for Vision Position Offset will appear, as shown in ③ in the last line of Move L. (The button is not displayed if there is no Motion Command between Vision and End Vision.) Caution: To use Vision Position Offset, it is necessary to perform calibration in the Workcell Manager. Without calibration, the robot cannot be moved to a desired position. |
|
4 |
Vision Position Offset |
|
|
5 |
Vision Variable |
Select a pose to match the Vision and robot coordinates. |