|
No. |
Item |
Description |
|---|---|---|
|
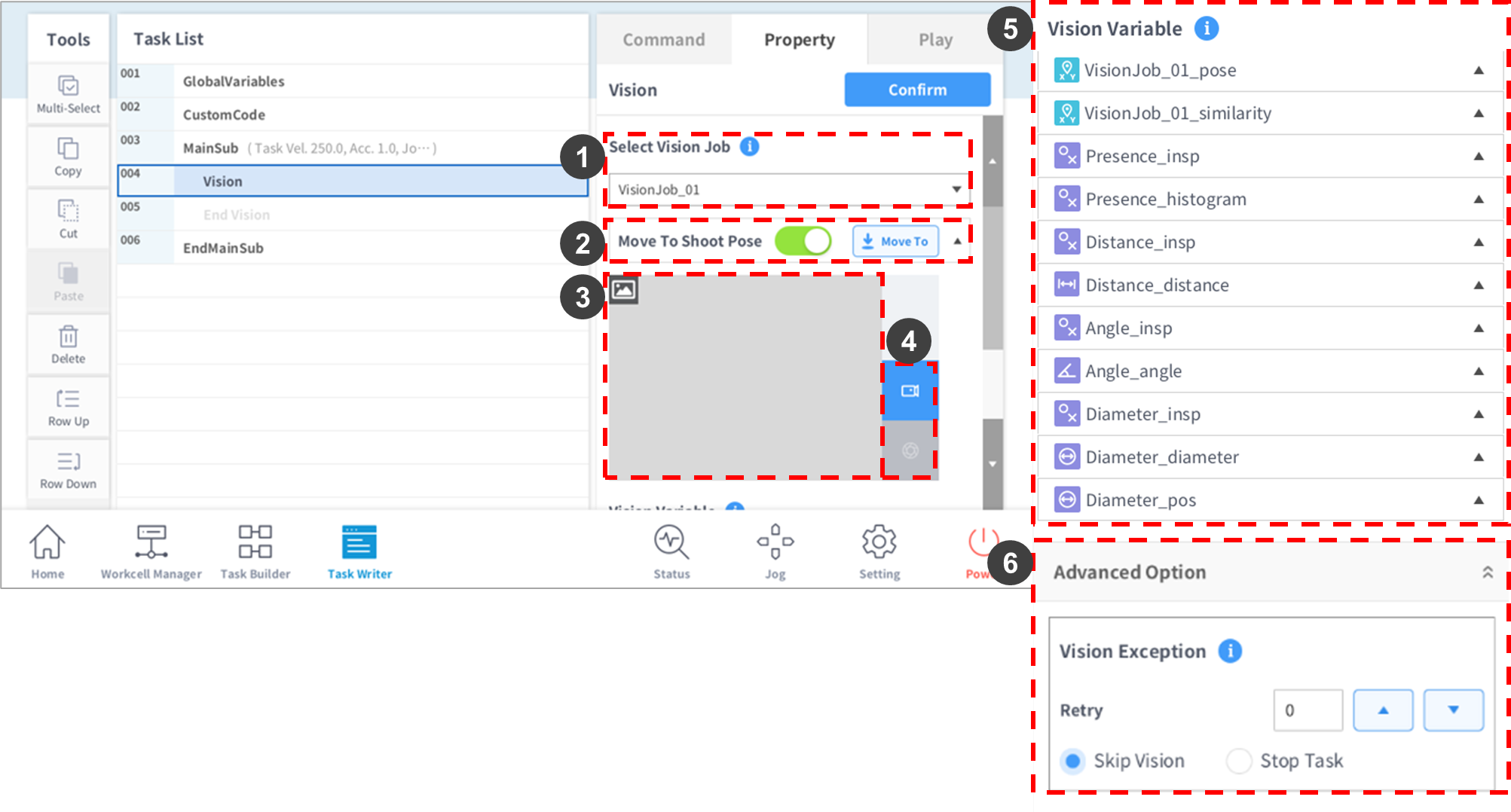
1 |
Select Vision Job |
The Vision Job List configured in the Workcell Manager displays the image of the Vision Job selected from the popup list.
A Vision Job can be selected. |
|
2 |
Move to Shoot Pose |
|
|
3 |
Display Image |
Default image, Live image and Shoot image are displayed. |
|
4 |
|
Tap the Live button to display the live image. Tap the Shoot button to display the test result image.
Live mode ends after 5 minutes of no action. |
|
5 |
Vision Variable |
|
|
6 |
Advanced Option > Vision Exception |
Select an action if Vision measurement fails.
|


If an object is measured after the Shoot button is clicked, the object must not move until MoveL completes Get_pose. If the object is moved before Get_pose is complete, the robot will not move to a desired point during Vision offset.