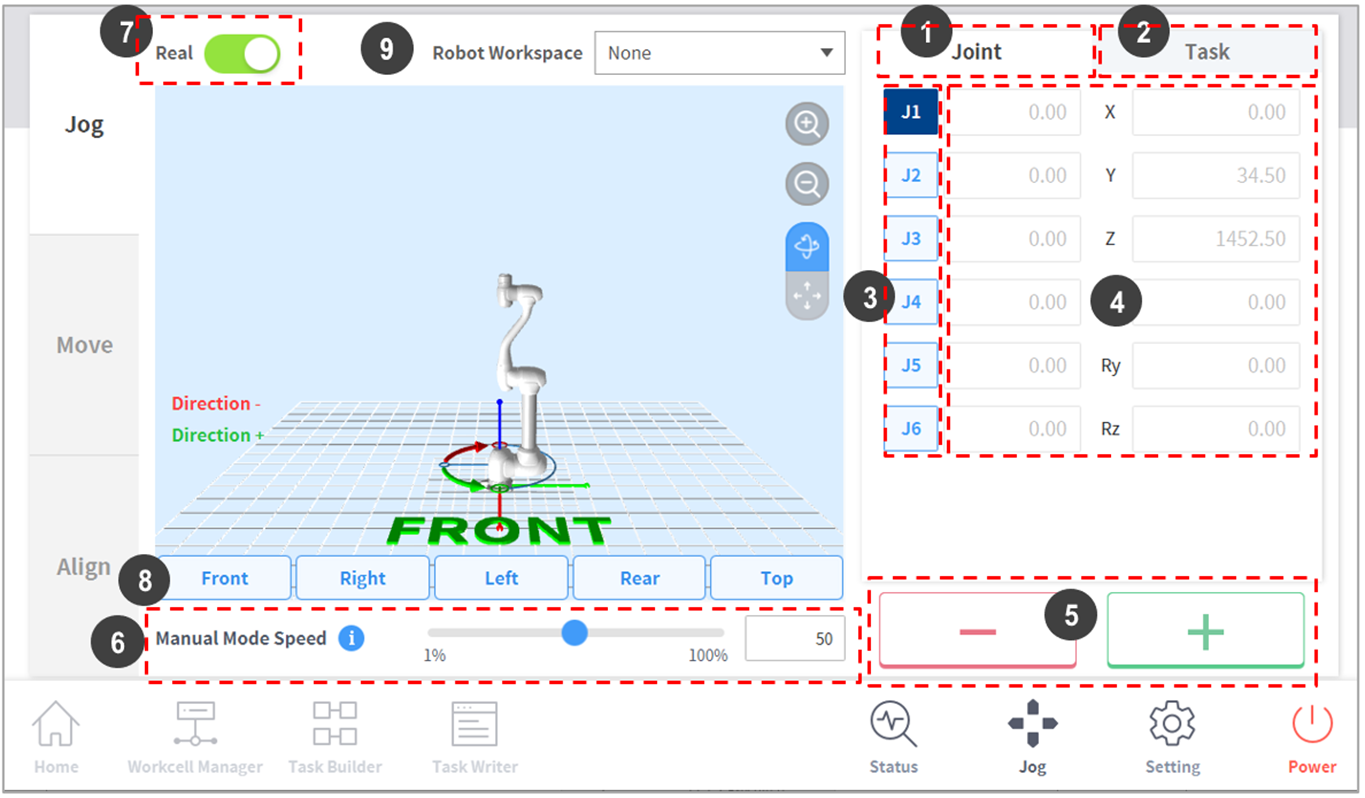
Użytkownik może poruszać robotem na podstawie bieżącej pozycji na ekranie Jog (impulsowania).
|
Lp |
Element |
Opis |
|---|---|---|
|
1 |
Joint |
Służy do ustawienia przegubu jako współrzędnej odniesienia dla impulsowania. |
|
2 |
Task |
Służy do ustawienia zadania jako współrzędnej odniesienia dla impulsowania. |
|
3 |
Select Axis |
Należy wybrać oś, aby wykonać ruch w trybie impulsowania.
|
|
4 |
Coordinate Display |
Zostaną wyświetlone współrzędne robota aktualnie używanego w trybie Jog. Jeśli pozycja robota zmienia się po naciśnięciu przycisku kierunku, wraz z nią ulega zmianie współrzędna. |
|
5 |
Direction |
Powoduje ruch robota w kierunku + lub - na wybranej osi. |
|
6 |
Manual Mode Speed |
Konfiguruje prędkość ruchu robota w trybie ręcznym. Prędkość można regulować przez przeciągnięcie wskaźnika na suwaku. Jeśli wskaźnik na suwaku znajduje się w pozycji 100%, odpowiadająca jej maksymalna prędkość przegubu w karcie Jog wynosi 30 deg/s, a maksymalna prędkość zadania wynosi 250 mm/s. Prędkość ta wpływa na prędkość sterowaną za pomocą przycisku impulsowania i przycisku ruchu. |
|
7 |
Real Mode |
Służy do konfigurowania, czy robot ma działać w trybie rzeczywistym podczas impulsowania.
|
|
8 |
Simulator Alignment |
Służy do wyboru kierunku wyrównania robota wyświetlanego na ekranie symulatora. Naciśnięcie każdego z przycisków kierunku powoduje wyrównanie robota w odpowiednim kierunku. |
|
9 |
Robot Workspace |
Wyświetla informacje o przestrzeni pracy robota zarejestrowanych w Workcell Manager i Jog Simulator. Aby wybrać przestrzeń roboczą do wyświetlenia, należy nacisnąć menu rozwijane. |


-
Limit prędkości TCP: Najwyższa prędkość działania podczas impulsowania i obsługi za pomocą przycisku ruchu jest ograniczona do 250 mm/s zgodnie z zasadami bezpieczeństwa.
-
Jeśli robot zatrzyma się wskutek osiągnięcia limitu przegubu lub wykrycia kolizji podczas ruchu w trybie impulsowania, należy ustawić tryb awaryjnego przywracania i ustawić robota w zakresie limitu kąta przegubu. Zobacz „ Tryb awaryjnego przywracania”, aby uzyskać więcej informacji na temat trybu awaryjnego przywracania.