Przywraca system robota do określonej wersji wybranej przez użytkownika.
-
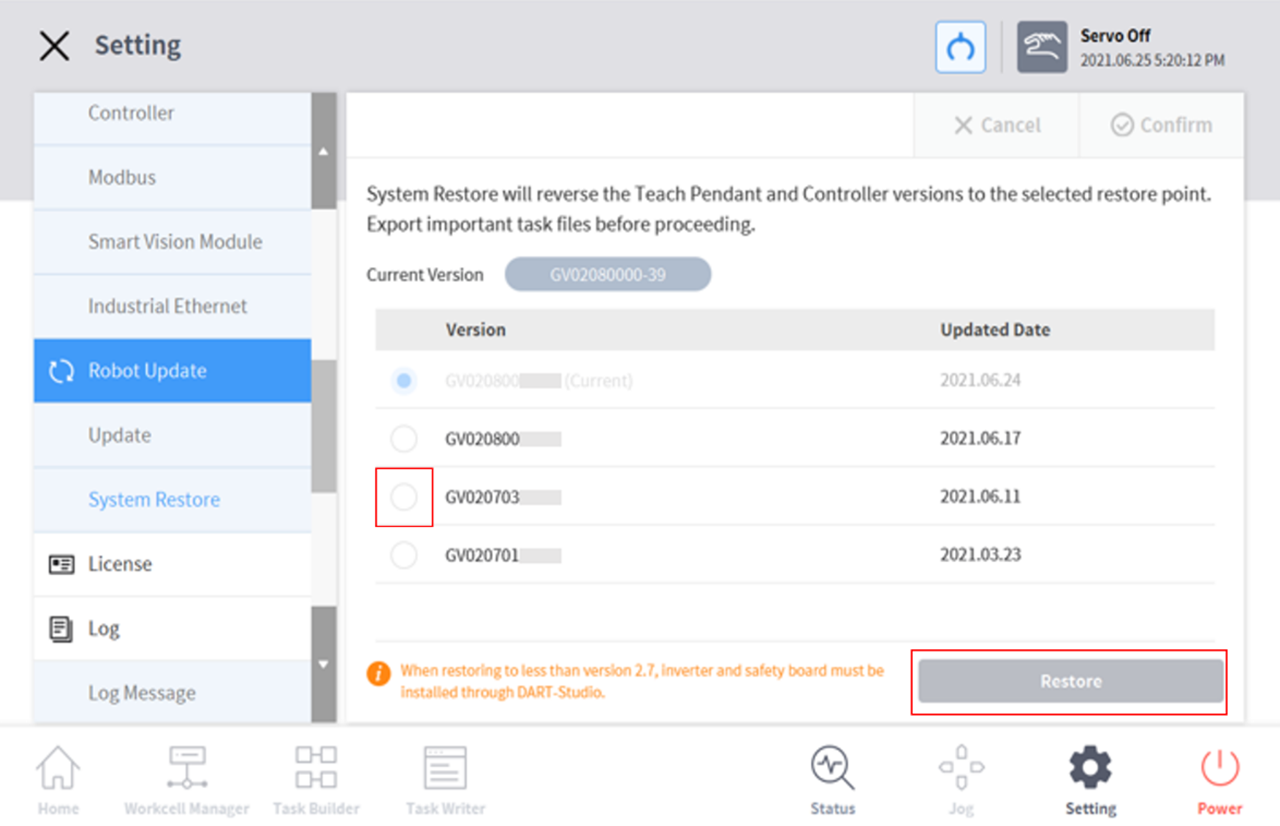
Wybrać Robot Update > System Restore z menu Setting.Na ekranie jest wyświetlanych pięć ostatnich wersji zainstalowanych w systemie robota.Aktualna wersja jest wyświetlana z zaznaczonym przyciskiem wyboru.
-
Należy zaznaczyć przycisk wyboru przy wersji, która ma zostać przywrócona.Przycisk Restore jest aktywny.
-
Nacisnąć przycisk Restore.
-
Po ukończeniu przywracania należy ponownie uruchomić system.
-
Funkcja przywracania systemu jest niedostępna, jeśli dostęp do systemu odbywa się z systemu operacyjnego Windows.
-
Jeśli po przywróceniu systemu w produkcie z serii A wystąpi jeden z poniższych problemów, należy zapoznać się z punktem „Kalibracja tarcia”, aby przeprowadzić kalibrację tarcia.
-
Jeśli jakiś problem utrudnia bezpośrednią kontrolę nauczania.Jeśli bezpośrednie uczenie nie działa prawidłowo, nawet jeżeli masa narzędzia i punkt środkowy masy są prawidłowe.Jeśli robot porusza się zbyt szybko lub przykłada zbyt dużą siłę podczas próby bezpośredniego nauczania.Jeśli sterowanie w określonym kierunku jest utrudnione przy próbie bezpośredniego nauczania.Jeśli przy ustawieniu domyślnym czułości wykrywania kolizji często występują kolizje.
-
Jeśli błąd „2.9015” występuje sporadycznie w programatorze ręcznym.Błąd 2.9015: Siła zewnętrzna końcówki robota przekroczyła bezpieczny zakres.
Scroll conditional content hidecontents