Obowiązkowe Normalny 20 min
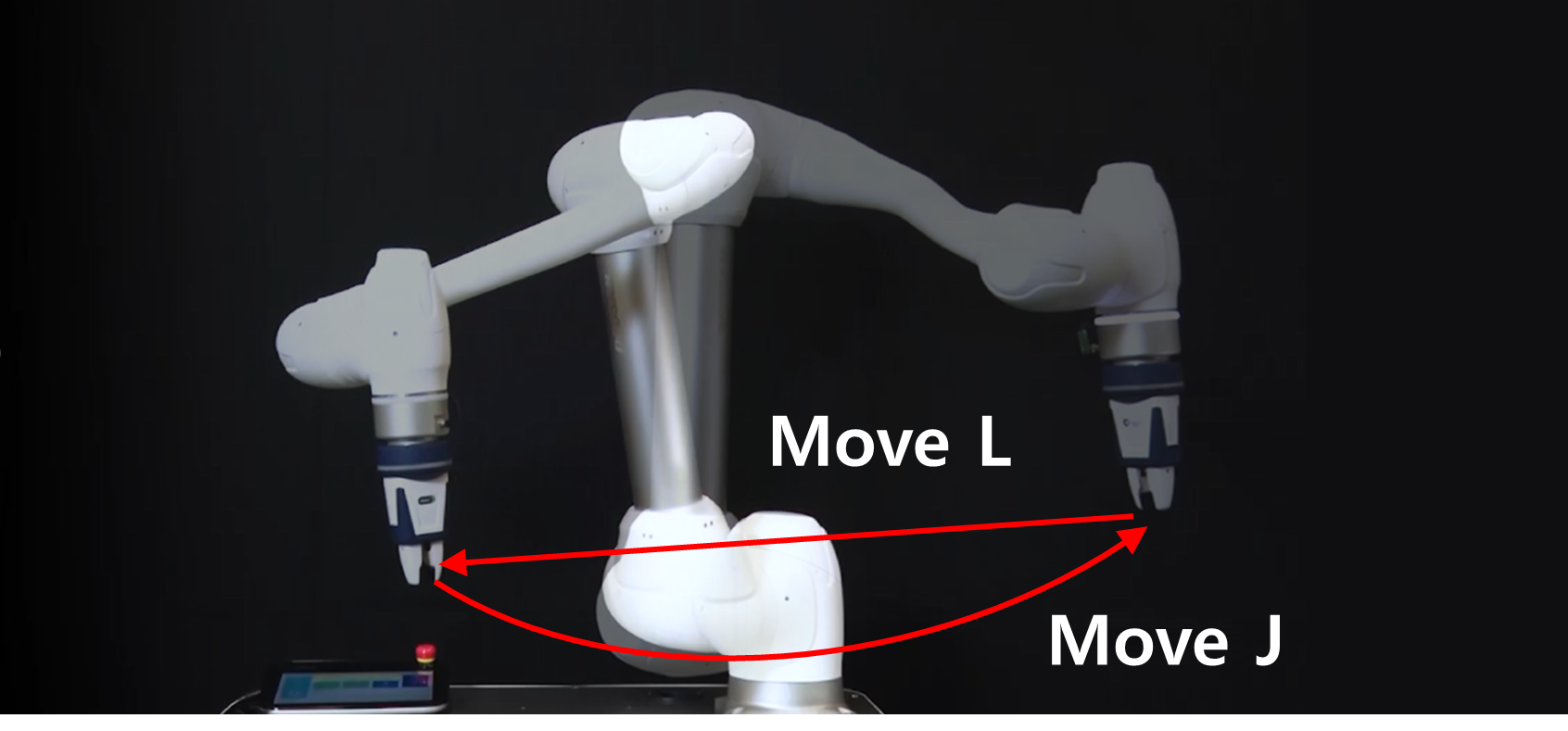
W tym przypadku dodaj polecenia MoveJ i MoveL w aplikacji Task Builder, wykonaj je i porównaj różnicę pomiędzy dwoma ruchem.
PRZESTROGA
-
Przed próbą pobrania próbki należy przeczytać i postępować zgodnie (2.12-pl_PL) Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz (2.12-pl_PL) CZĘŚĆ 1. Podręcznik bezpieczeństwa.
-
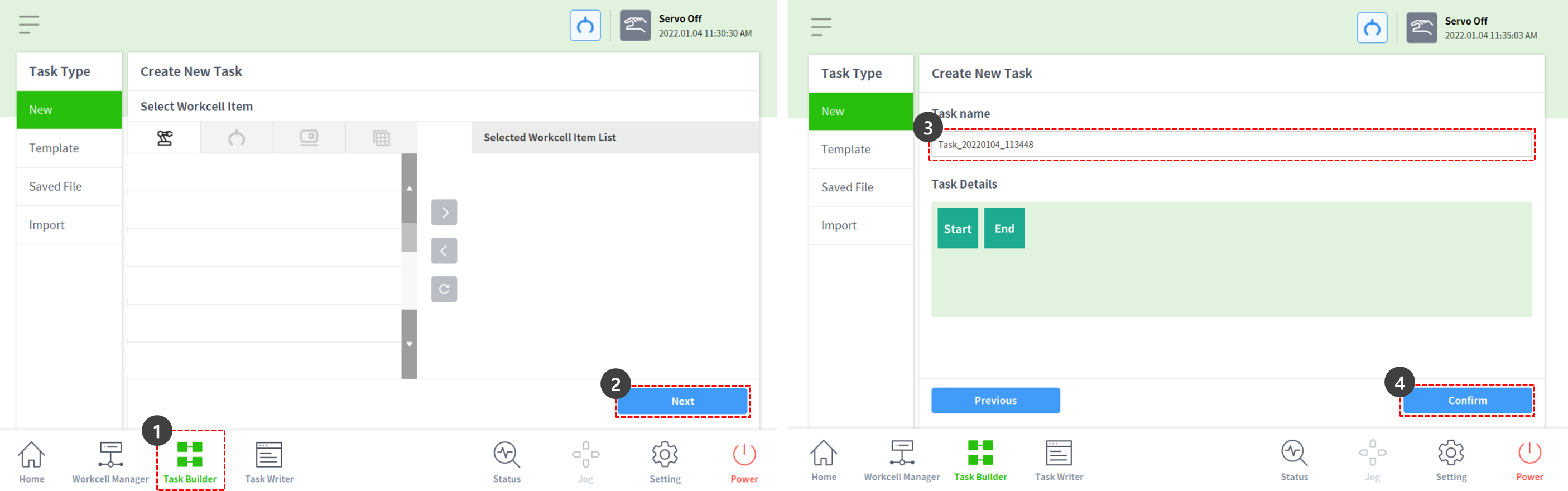
Wybrać Budowa zadania z paska u dołu ekranu.
-
Metoda programowania w aplikacji Task Writer jest prawie taka sama jak w aplikacji Task Builder.
-
-
Naciśnij przycisk Dalej.
-
Aby utworzyć program z zarejestrowanymi elementami komórki roboczej, takimi jak chwytaki, należy dodać element komórki roboczej.
-
W tym przypadku należy nacisnąć przycisk Dalej bez wybierania elementów i umiejętności z komórki roboczej.
-
-
Wprowadź nazwę zadania.
-
Nacisnąć przycisk zatwierdzania.
-
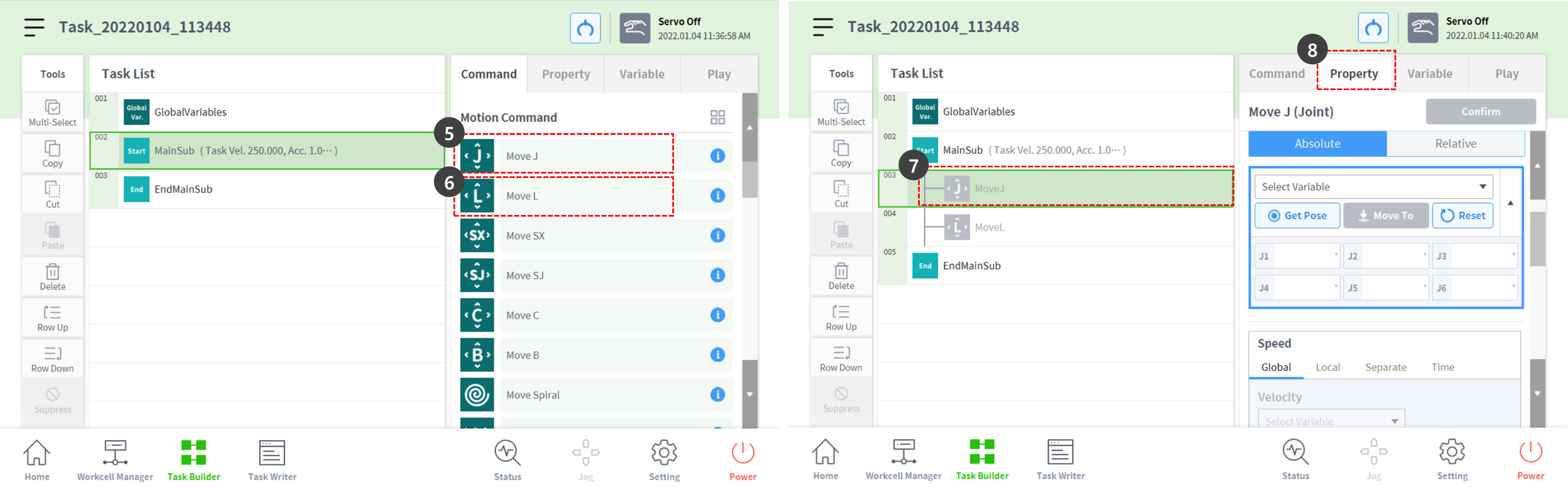
Po wybraniu MainSue w drugim wierszu naciśnij MoveJ, aby dodać polecenie MoveJ do listy zadań.
-
Polecenie zostanie dodane do następującego wiersza wybranego polecenia.
-
-
Naciśnij MoveL, aby dodać polecenie MoveL do listy zadań.
-
Wybrać MoveJ w trzecim wierszu listy zadań.
-
Wybrać kartę właściwość w prawym górnym rogu. Wartości właściwości polecenia można ustawić na karcie właściwość.
-
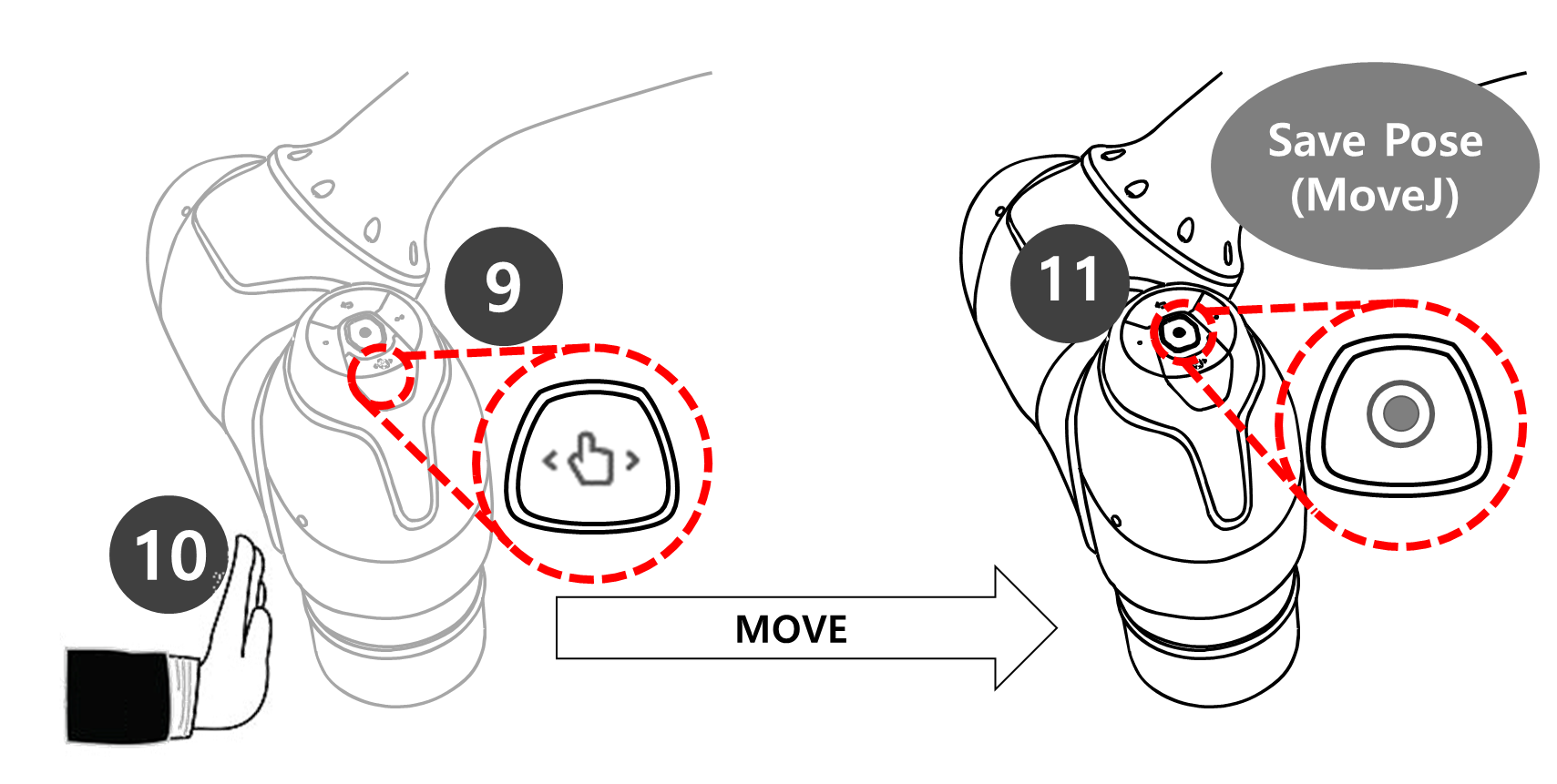
Jedną ręką naciśnij i przytrzymaj przycisk prowadzenia ręcznego, który ma kształt dłoni, znajdujący się na kokpicie u góry robota Krok 9 do 11 zapisuje pozycję MoveJ.
-
W przypadku robotów, które nie mogą korzystać z kokpitu, należy zapoznać się z poniższą „uwatem”.
-
-
Drugą ręką przesuń odkurzacz automatyczny w bezpieczne miejsce.
-
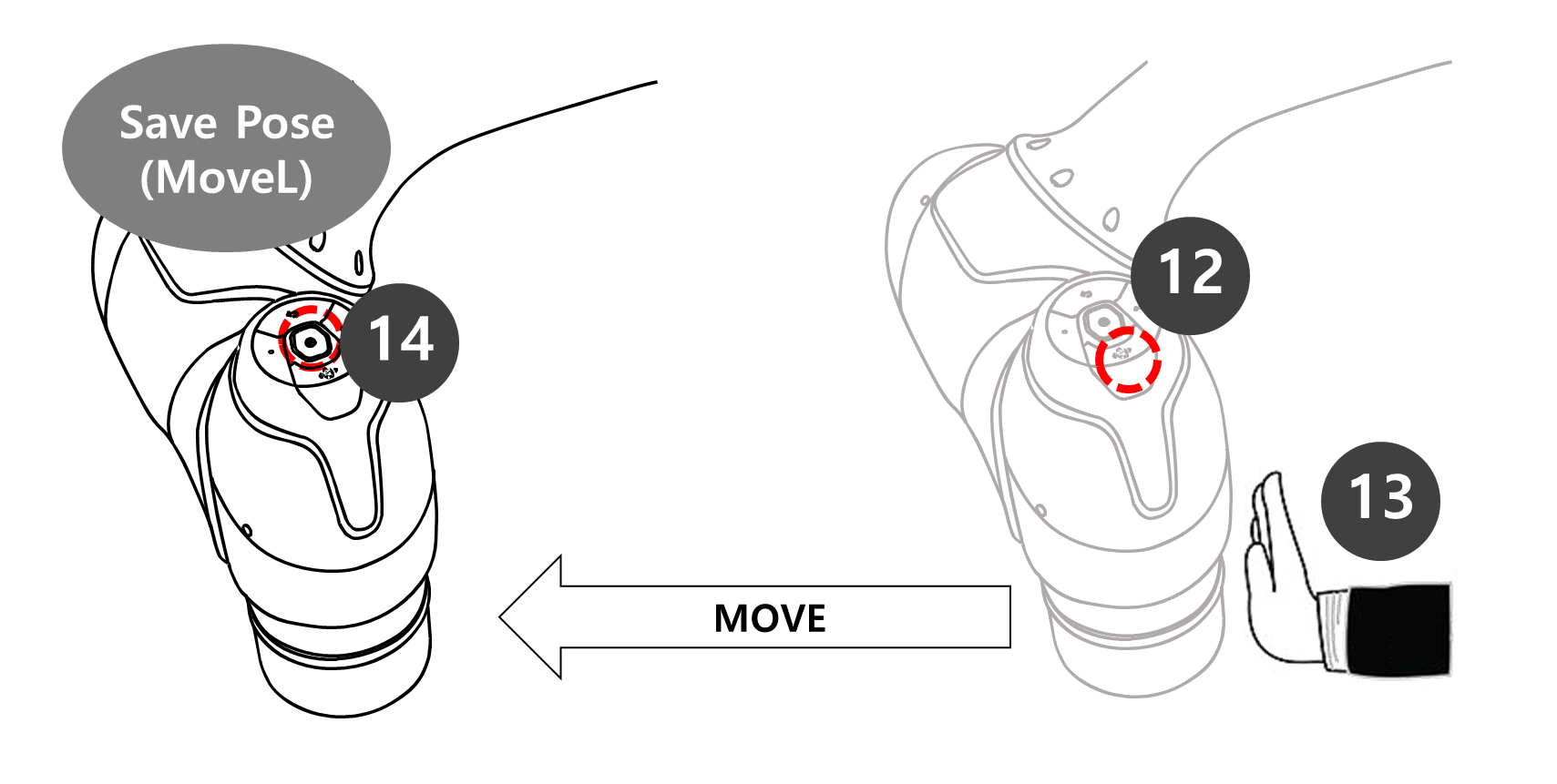
Zwolnij przycisk prowadzenia ręcznego i naciśnij przycisk zapisywania pozycji.
-
Jedną ręką naciśnij i przytrzymaj przycisk prowadzenia ręcznego, który ma kształt dłoni, znajdujący się na kokpicie u góry robota Krok 12 do 14 zapisuje pozycję MoveL.
-
Nie ma potrzeby wybierania MoveL z listy zadań. Po naciśnięciu przycisku zapisywania pozycji lista zadań automatycznie przechodzi do linii zadania.
-
-
Drugą ręką przesuń odkurzacz automatyczny w bezpieczne miejsce.
-
Zwolnij przycisk prowadzenia ręcznego i naciśnij przycisk zapisywania pozycji.
-
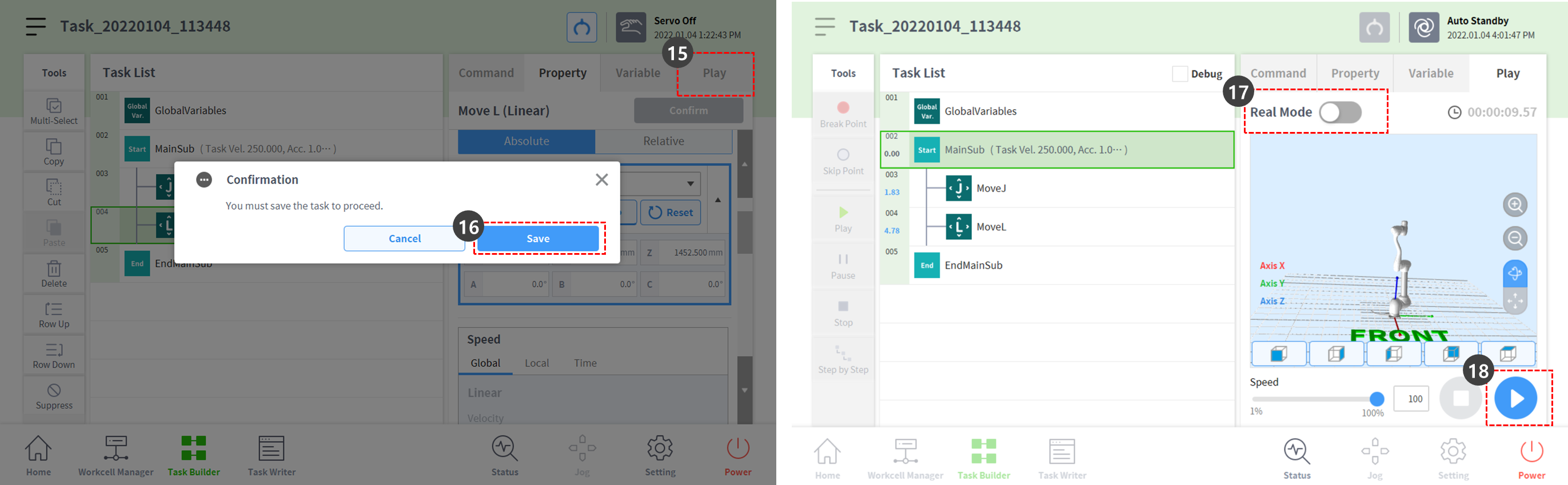
Naciśnij kartę Odtwórz, aby wykonać zadanie.
-
Ponieważ zadanie nie jest zapisywane, wyświetlane jest okno podręczne z prośbą o zapisanie zadania. Naciśnij przycisk Zapisz.
-
Ustawić przycisk przełączania trybu rzeczywistego w stanie wyłączonym (szary).
-
Jeśli tryb rzeczywisty jest wyłączony, robot nie porusza się i porusza się tylko wirtualny robot w symulatorze ekranu.
-
Przed wykonaniem zadania zaleca się przetestowanie zadania w tym trybie symulacji.
-
-
Naciśnij przycisk odtwarzania w prawym dolnym rogu.
-
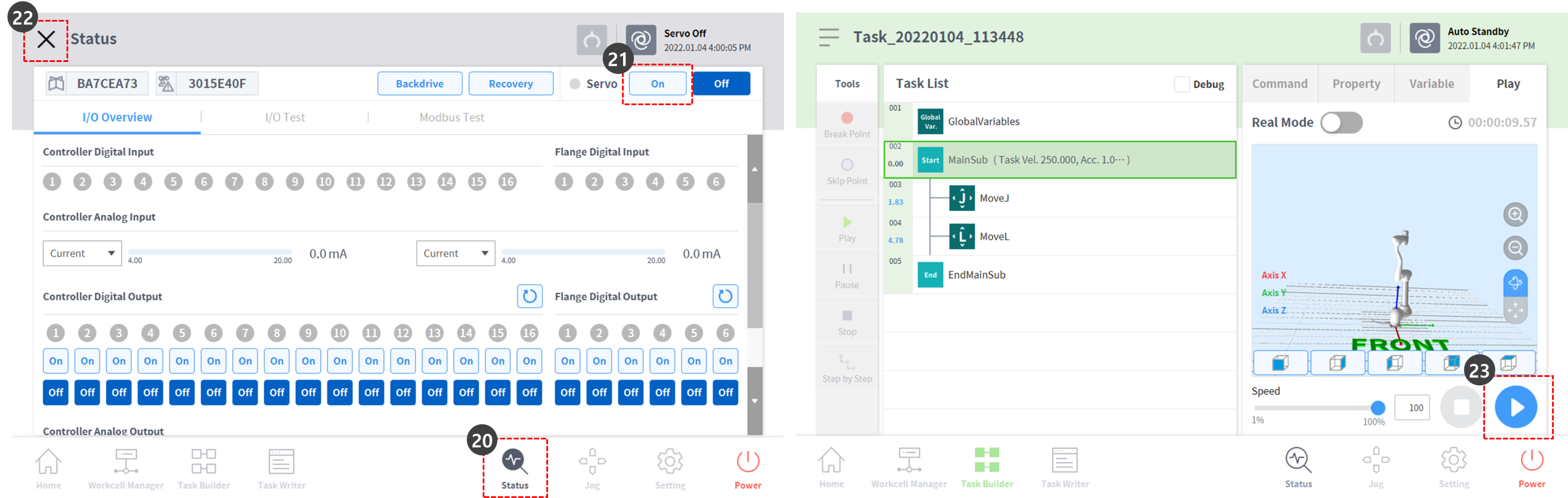
Zostanie wyświetlony komunikat o błędzie informujący, że robot nie jest gotowy. Nacisnąć przycisk X, aby zamknąć okno podręczne.

-
Robot może poruszać się tylko w stanie Servo ON.
-
Serwomechanizm włączony i serwomechanizm wyłączony robota można włączać i wyłączać za pomocą opcji Status > Servo.
-
-
Aby ustawić robot w stanie gotowości, należy ustawić go w trybie Servo ON. Wybierz opcję stan na pasku u dołu.
-
Nacisnąć przycisk Servo ON.
-
Naciśnij przycisk X w lewym górnym rogu, aby zamknąć okno stanu.
-
Ponownie naciśnij przycisk odtwarzania w prawym dolnym rogu. Robot ruszy z powodzeniem w symulatorze.
-
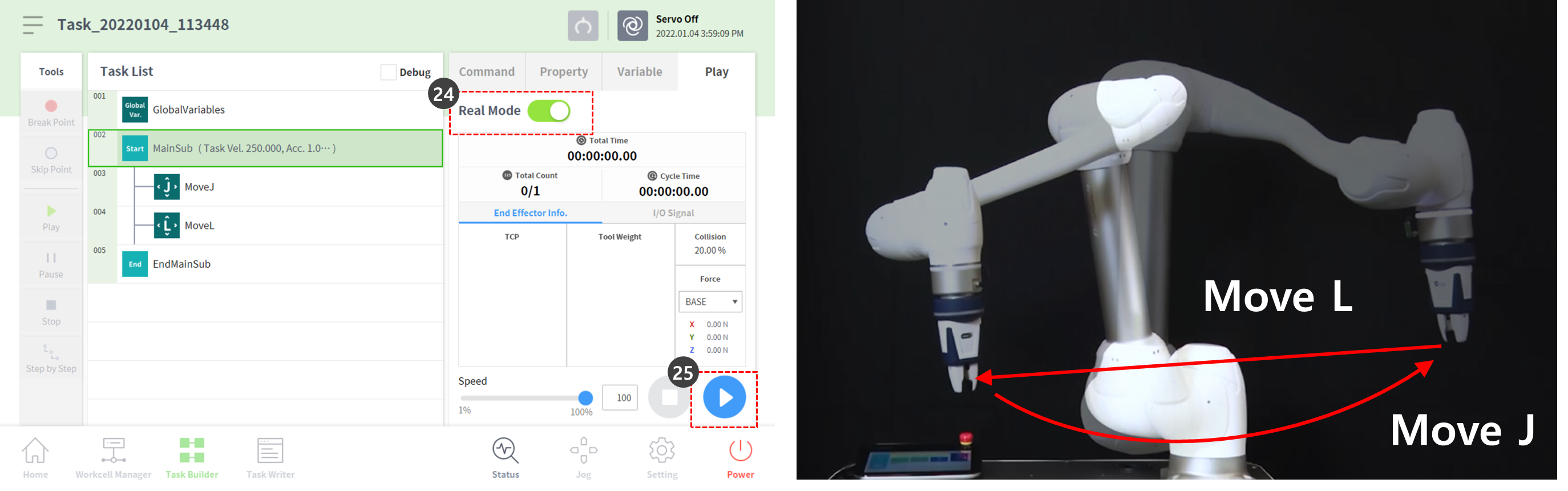
Ustawić przycisk przełączania trybu rzeczywistego w celu włączenia stanu (zielony), aby uruchomić rzeczywisty robot.
-
Naciśnij przycisk odtwarzania w prawym dolnym rogu. Rzeczywisty robot pomyślnie się poruszy.
Uwaga
Przycisk zapisywania pozycji w kokpicie wykonuje następujące funkcje w tej samej kolejności na ekranie manipulatora programowania.
-
Naciśnij przycisk Właściwości > Pobierz pozycję , aby załadować bieżące informacje o pozycji.
-
Nacisnąć przycisk Potwierdź , aby zapisać zmiany we właściwości polecenia.
-
Wybrać następne polecenie.
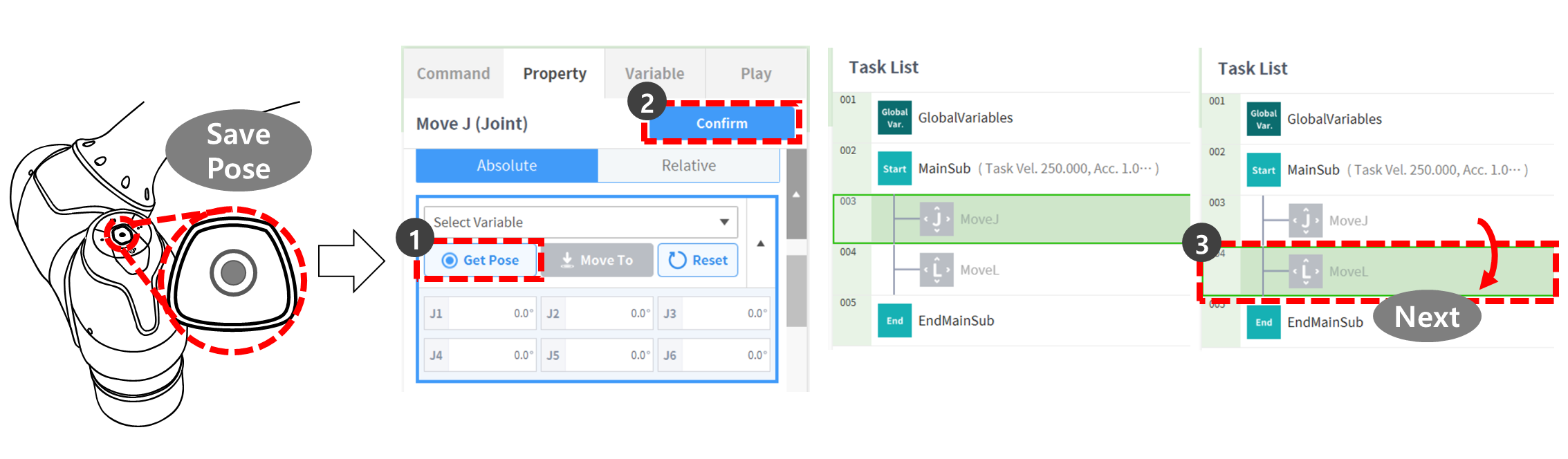
Dzięki temu można szybko zaprogramować zadania, dodając do listy zadań wiele poleceń ruchu, przesuwając robot, naciskając jednocześnie przycisk ręcznego prowadzenia na kokpicie i naciskając przycisk Get pose.