Aby sprawdzić i przetestować informacje o we/wy, należy nacisnąć przycisk Status w menu głównym.
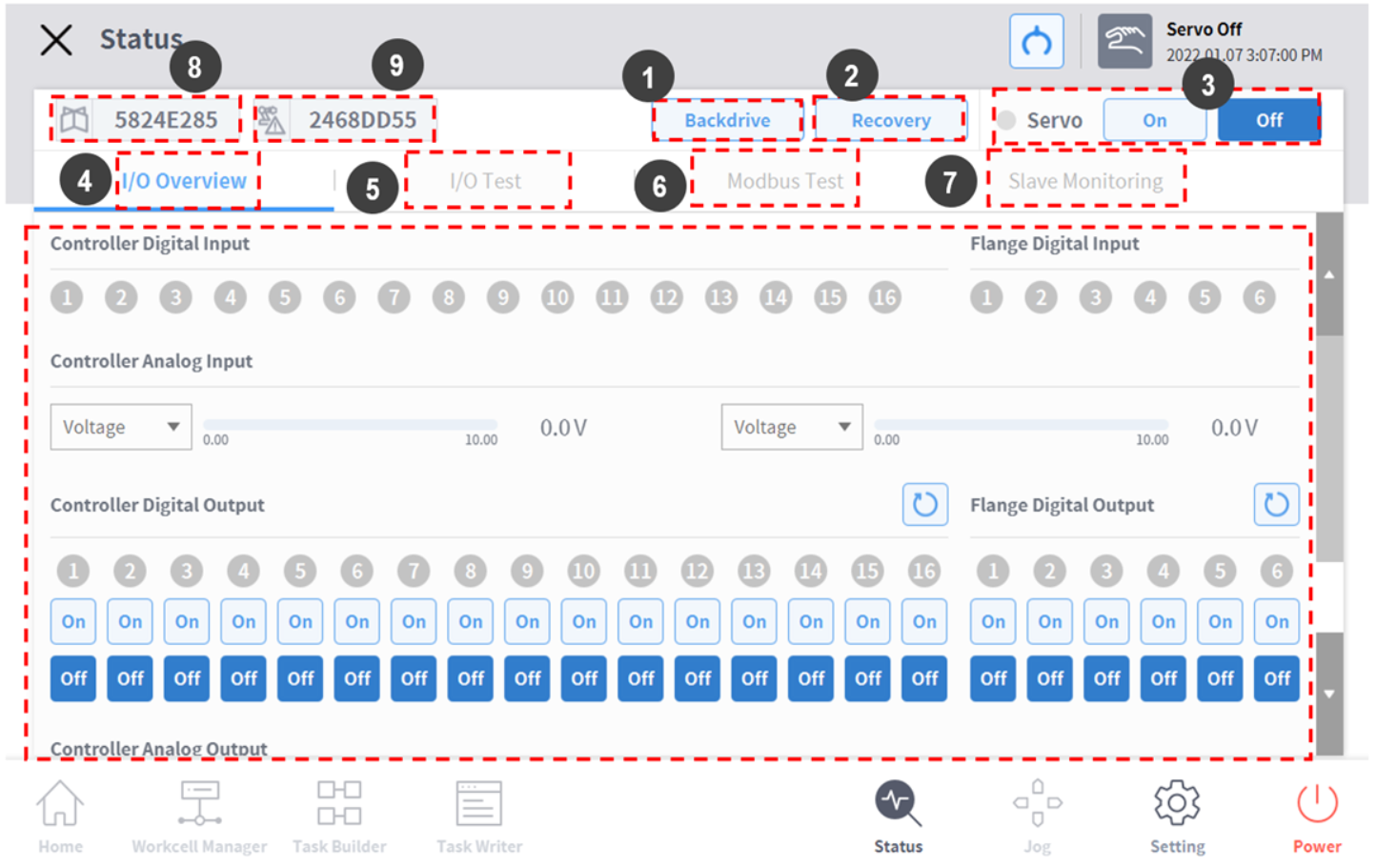
W oknie Status można sprawdzić informacje o we/wy urządzeń podłączonych do sterownika i kołnierza, a także uruchamiać tryb Backdrive i funkcję Safety Recovery.
Status to okno podręczne, w którym można nacisnąć przycisk Status na ekranie Home, Task Builder lub Task Writer nawet w trybie automatycznym, aby sprawdzić informacje o we/wy. Testu wyjść nie można wykonać w trybie automatycznym.
|
Lp |
Element |
Opis |
|---|---|---|
|
1 |
Backdrive |
Jeśli robot zostanie zatrzymany z powodu nieprawidłowości podczas pracy, użytkownik może odciąć zasilanie od każdego przegubu i przestawić przegub ręcznie do żądanej pozycji, aby przywrócić normalne działanie. |
|
2 |
Safety Recovery |
Służy regulacji kąta i pozycji robota podczas ustawiania robota w trybie przywracania programowego i trybie pakowania. |
|
3 |
Servo On |
Dostarcza zasilanie do poruszania każdym przegubem robota. |
|
4 |
I/O |
Służy do zarządzania stanem cyfrowych i analogowych we/wy sterownika i kołnierza. |
|
5 |
I/O Test |
Służy do sprawdzania i testowania urządzeń cyfrowego i analogowego we/wy sterownika i kołnierza używanych w zadaniu. |
|
6 |
Modbus Test |
Testuje sygnały ustawionego urządzenia Modbus. |
|
7 |
Slave Monitoring |
Monitoruje wszystkie podfunkcje przemysłowego Ethernetu (PROFINET, EtherNet / IP, Modbus) |
|
8 |
Job Space Status Value |
Wyświetla szyfrowanie całości danych przestrzeni zadania zarejestrowane w celu sprawdzenia, czy konfiguracja przestrzeni zadania została zmodyfikowana. |
|
9 |
Safety Setup Status Value |
Wyświetla szyfrowanie całości danych dotyczących bezpieczeństwa zarejestrowanych w celu sprawdzenia, czy konfiguracja bezpieczeństwa została zmodyfikowana. |