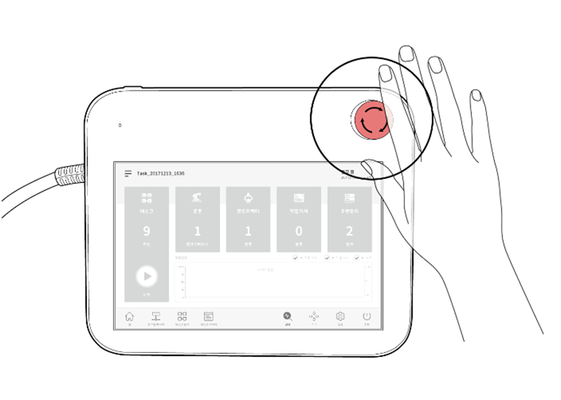
Użytkownik może skorzystać z przycisku zatrzymania awaryjnego w celu zatrzymania systemu w sytuacjach awaryjnych. W sytuacjach awaryjnych należy nacisnąć przycisk zatrzymania awaryjnego w prawym górnym rogu manipulatora danych, aby natychmiast zatrzymać system.
Uwaga
-
Funkcję zatrzymania awaryjnego należy stosować jako dodatkowyśrodek ochronny, a nie jako środek zabezpieczający.
-
SS1 (Safe Stop 1)jest ustawiony jako domyślny tryb awaryjnego zatrzymania.
-
Jeśli potrzebny jest wynik oceny ryzyka aplikacji robota, można zainstalować dodatkowe przyciski zatrzymania awaryjnego.
-
Przycisk zatrzymania awaryjnego musi być zgodny z normą IEC 60947-5-5.
-
Jeśli zatrzymanie awaryjne nastąpiło za pomocą przycisku zatrzymania awaryjnego podłączonego do portu we/wy bezpieczeństwa,przycisk umożliwiający dostęp do ekranu ustawieńwejścia bezpieczeństwau dołu okna podręcznego zatrzymania awaryjnego jest włączony.