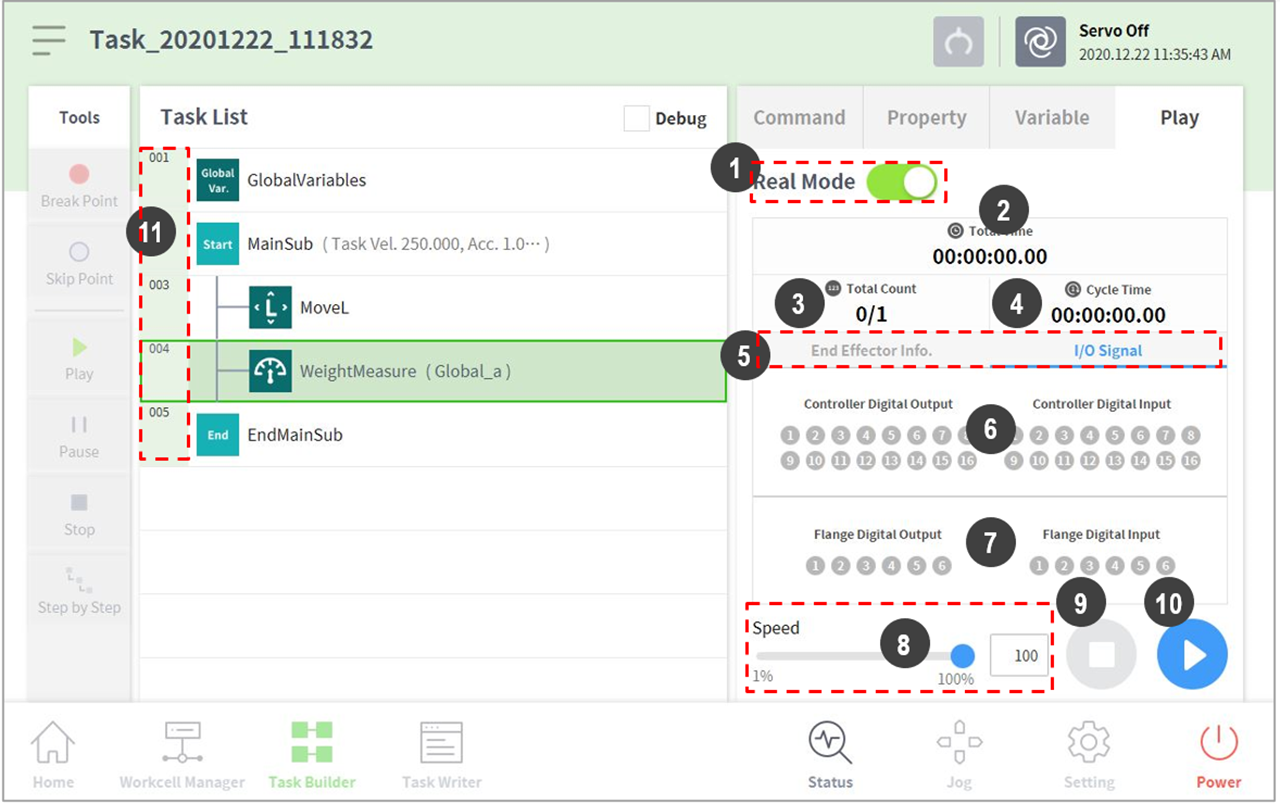
The real mode play screen end I/O information tab of Task Builder is structured as follows:
|
No. |
Item |
Description |
|
1 |
Real mode ( |
Sets the robot test play mode.
|
|
2 |
Total time |
Displays the total time elapsed after the task execution. |
|
3 |
Total count |
Displays the total number of task executions. |
|
4 |
Average execution time |
Displays the average time spent to execute one cycle of the task in the task list. |
|
5 |
Information Screen Shift Tab |
You can switch between the robot information message screen, End-Effector information screen, and input/output information screen.
|
|
6 |
Controller digital I/O signal |
Displays the controller digital I/O signals of the current task.
|
|
7 |
Flange digital I/O signal |
Displays the flange digital I/O signals of the current task.
|
|
8 |
Speed slider |
It sets the speed of the robot in a real or a virtual mode. |
|
9 |
Stop button |
It stops the current task. |
|
10 |
Execute/pause toggle button |
It executes or pauses the work in the task list. |
|
11 |
Time |
It displays the time spent on the corresponding command/skill. |