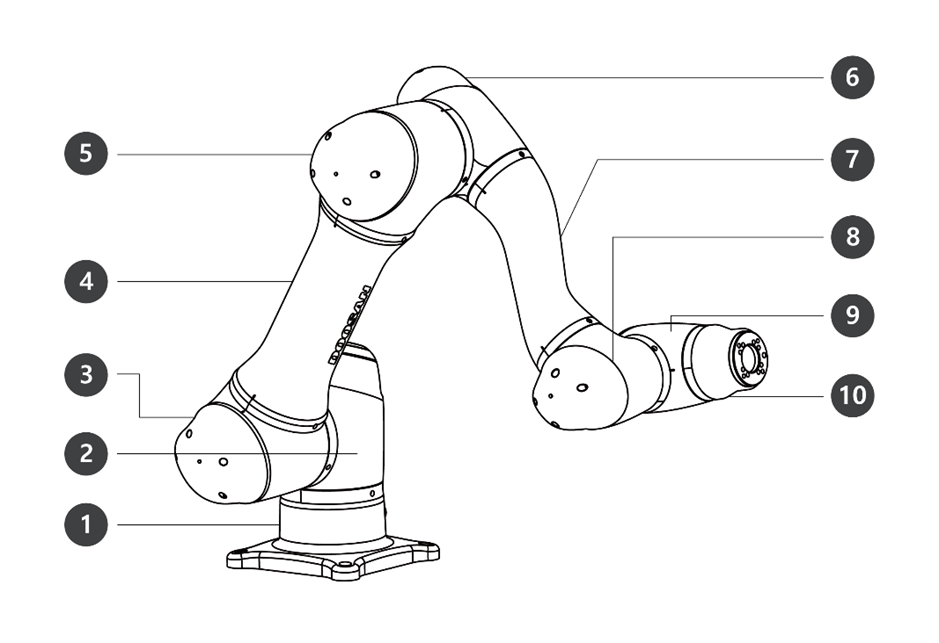
Manipulátor
Názvy součástí
|
Č. |
Název |
Č. |
Název |
|---|---|---|---|
|
1 |
Base |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Link1 |
9 |
J6 |
|
5 |
J3 |
10 |
Tool Flange |
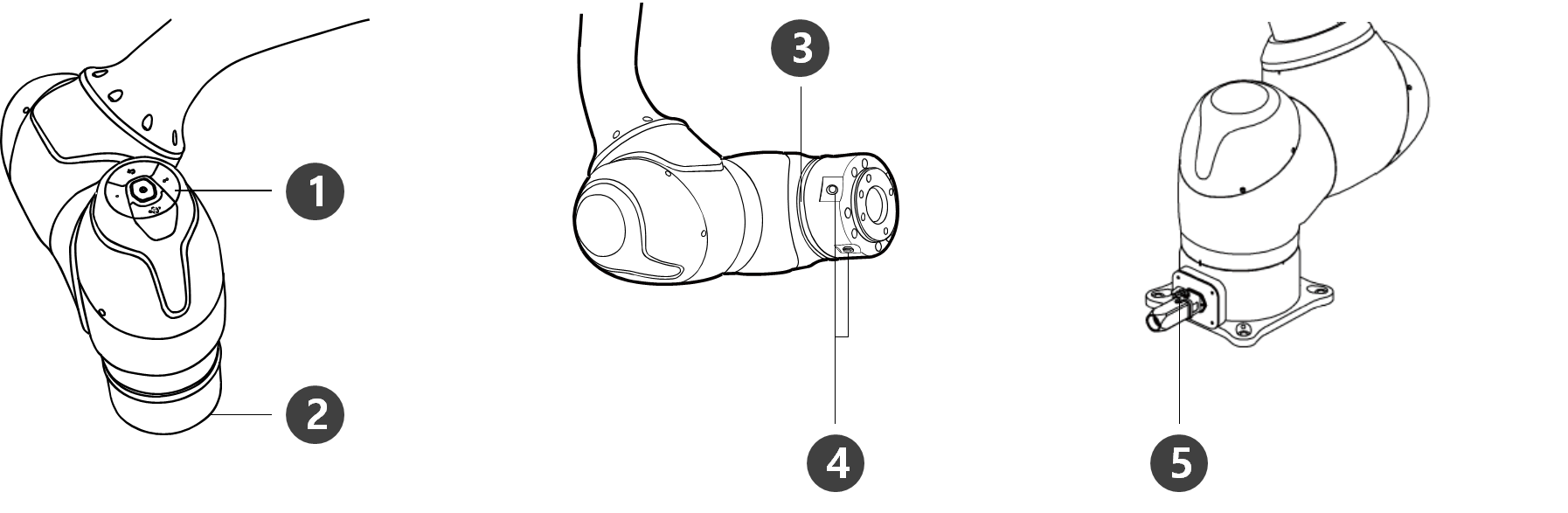
Klíčové funkce
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
Cockpit |
[Volba] Řadič použitý pro přímé učení a provoz. |
|
2 |
Tool flange |
Oblast pro instalaci nástrojů. |
|
3 |
Flange LED |
Zobrazuje stav robota pomocí různých barev. Více informací o stavu robota najdete v části (2.12-cs_CZ) Barva stavové a přírubové kontrolky pro každý režim Pro modely řady H je nainstalována dodatečná kontrolka na 1 ose označující stejný stav a barvu
|
|
4 |
Flange I/O |
I/O port pro ovládání nástroje.
|
|
5 |
Connector |
Používá se pro napájení a komunikaci robota |
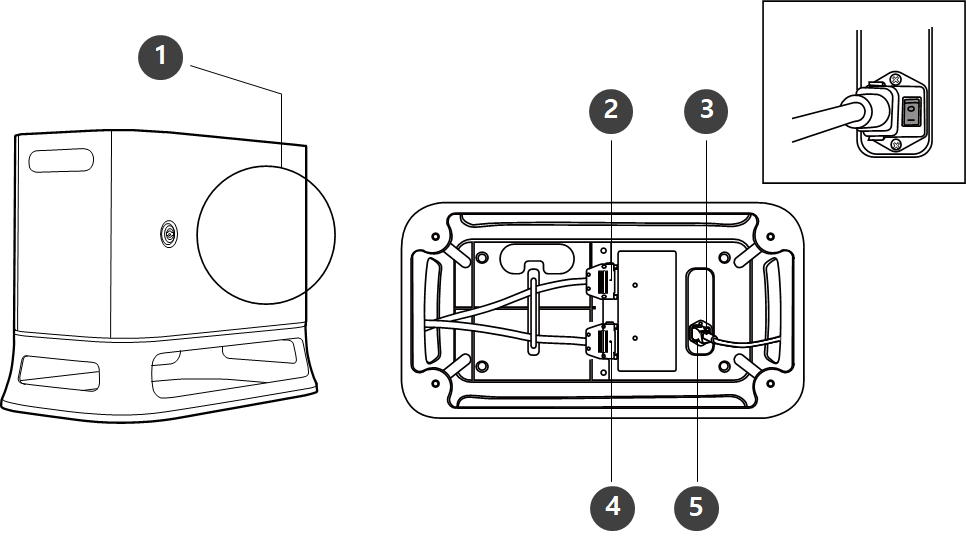
Ovladač
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
I/O connection terminal (internal) |
Používá se k připojení ovladač nebo periferních zařízení. |
|
2 |
Teach pendant cable connection terminal |
Používá se pro připojení kabelu učícího ovladače k ovladač. |
|
3 |
Power switch |
Používá se k zapnutí a vypnutí hlavního napájení ovladač. |
|
4 |
Manipulator cable connection terminal |
Používá se pro připojení kabelu manipulátoru k ovladač. |
|
5 |
Power connection terminal |
Používá se k připojení napájení ovladač. |
-
Pokud jste vybrali volitelný řadič, zkontrolujte pokyny v příloze ohledně připojení kabelů
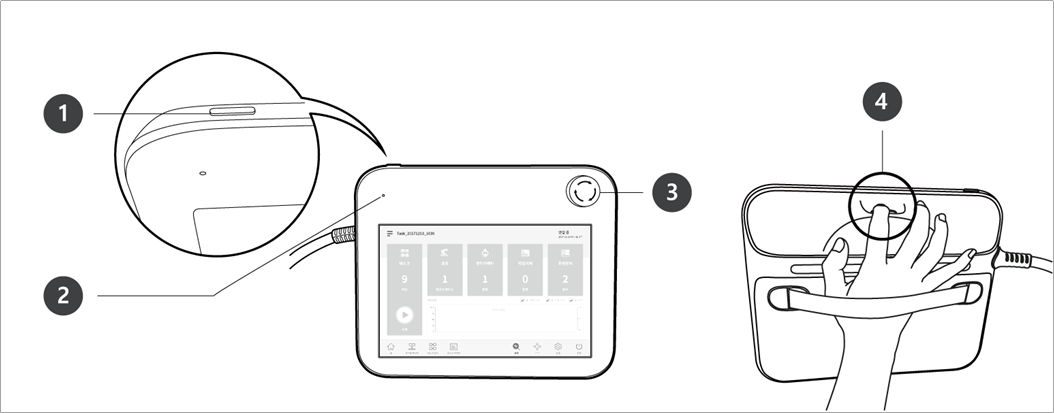
Učící ovladač
|
Č. |
Položka |
Popis |
|---|---|---|
|
1 |
Power button |
Používá se k zapnutí a vypnutí napájení učícího ovladače. Další informace najdete v (2.12-cs_CZ) Zapnutí/vypnutí napájení systému |
|
2 |
Power LED |
Když je k dispozici napájení, zařízení se zapne. |
|
3 |
Emergency stop button |
V případě nebezpečí stiskněte dané tlačítko, čímž se provoz robota zastaví. |
|
4 |
Hand guiding button |
Stiskněte a podržte tlačítko, aby se robot dal volně přesunout do požadované pozice |
-
Pokud potřebujete během práce chránit a držet učící ovladač, můžete ho používat bezpečněji a snadněji s měkkým krytem dodávaným společností Doosan Robotics.