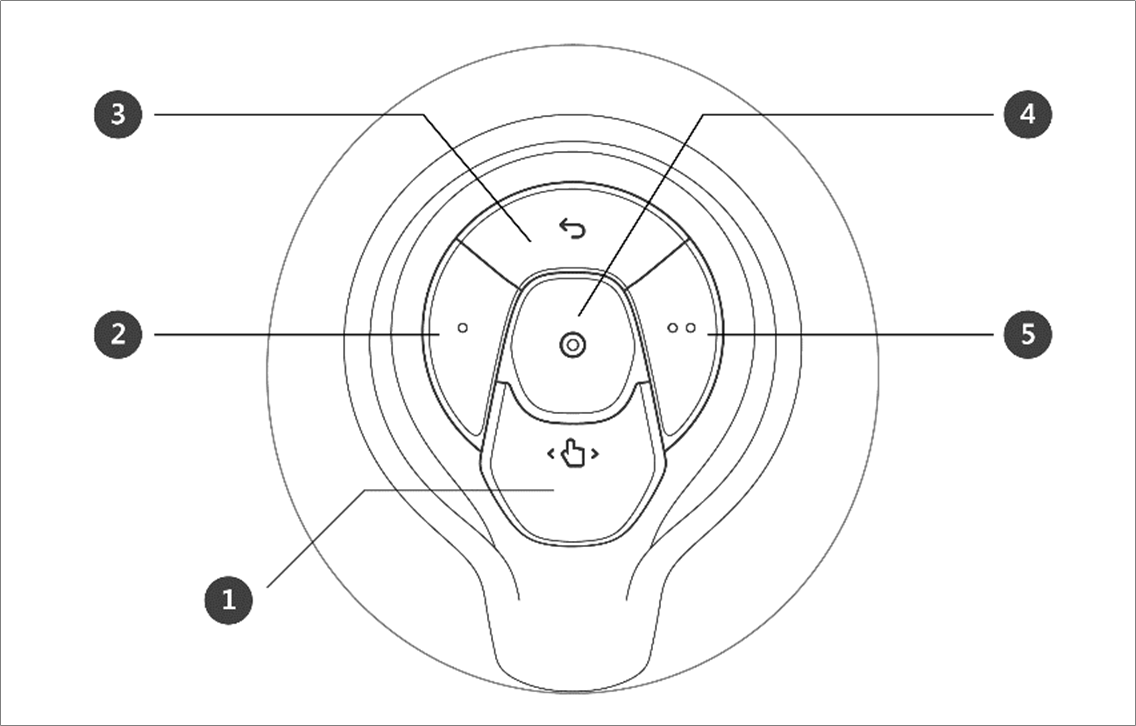
L'utilisateur peut modifier la position du robot en maintenant le bouton de guidage manuel ou le bouton de personnalisation enfoncé au niveau du cockpit.
|
No. |
Élément |
Description |
|---|---|---|
|
1 |
Hand-Guiding Button |
Ce bouton permet d'ajuster ou de modifier la position du robot. |
|
2, 5 |
User Setting Button |
Ce bouton permet de modifier la position du robot en saisissant une position conformément à une condition de verrouillage correspondant à un mode.
Pour plus d'informations à propos des paramètres, référez-vous à «Configuration du cockpit». |
|
3 |
Cancel Button |
Supprime la dernière position enregistrée. |
|
4 |
Save Pose Button |
Enregistre la position actuelle du robot. Pour plus d'informations, référez-vous à «Configuration du point de travail de commande de compétence avec les boutons du cockpit». |