Obligatoire Normal 15 min
L'utilisateur peut sélectionner une méthode de déplacement manuel dans l'onglet avance. Pour plus d'informations sur le décalage/déplacement/alignement, reportez-vous à Fonction Jogla section .
-
Jog: Il déplace le joint robot ou TCP vers l'axe du joint ou l'axe de coordonnées sélectionné par l'utilisateur
-
Déplacer: Il déplace le joint de robot ou TCP vers le point cible saisi par l'utilisateur
-
Aligner: Il déplace l'extrémité du robot vers le plan perpendiculaire au plan sélectionné par l'utilisateur et l'axe de coordonnées parallèle à l'extrémité du robot
Le mouvement du robot se compose de deux types.
-
Mouvement de liaison : Il déplace chaque liaison de façon linéaire avec un mouvement de rotation
-
Mouvement de tâche : Il déplace l'extrémité de manière linéaire vers le point cible
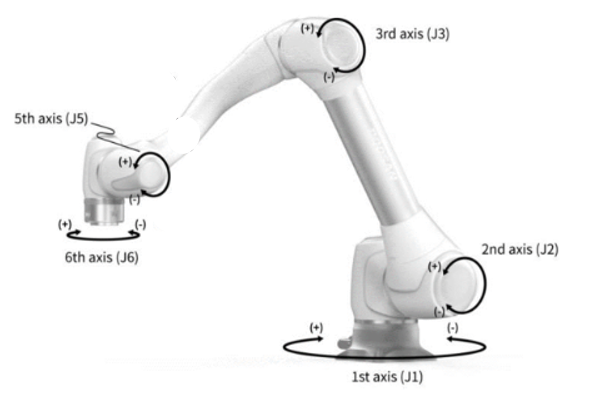
La méthode suivante explique comment déplacer le robot à l'aide d'un mouvement de liaison à partir de l'écran Jog :
-
Sélectionnez l'onglet liaison.
-
Sélectionnez l'axe à déplacer. Par exemple, vous pouvez sélectionner J1.
-
Appuyez sur le bouton +/- pour déplacer le robot. Le robot se déplace lorsque le bouton +/- est enfoncé et l'emplacement actuel est affiché à l'écran en temps réel.
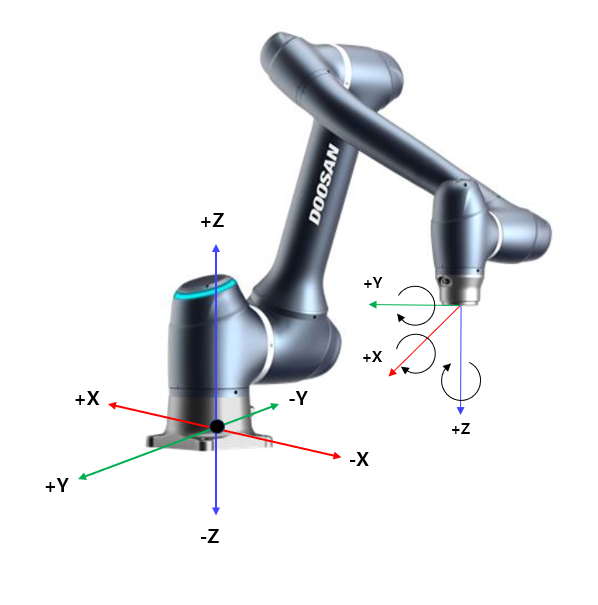
La méthode suivante explique comment déplacer le robot à l'aide du déplacement de tâche sur l'écran Jog :
-
Sélectionnez les coordonnées de la base. Le robot peut être déplacé en fonction des coordonnées DE BASE ou des coordonnées DE L'OUTIL.
-
Sélectionnez la direction à déplacer. Par exemple, l'axe X peut être sélectionné.
-
Appuyez sur le bouton +/- pour déplacer le robot. Le robot se déplace lorsque le bouton +/- est enfoncé et l'emplacement actuel est affiché à l'écran en temps réel.
Pour plus d'informations sur le mouvement de décalage, déplacez et alignez, reportez-vous à (2.11.0.1_temp-fr_FR) Écran Jogla section , (2.11.0.1_temp-fr_FR) Écran Movement (Mouvement) et (2.11.0.1_temp-fr_FR) Écran Aligner respectivement.
-
Si l'interrupteur à bascule du mode réel en haut à gauche de l'écran Jog est désactivé, le robot se déplace uniquement sur l'écran virtuel à gauche de l'écran Jog. Le robot réel se déplace si l'interrupteur à bascule du mode réel est activé.