Le robot peut être installé selon un angle quelconque. Pour configurer la position d'installation du robot, appuyez sur le bouton 
|
N° |
Élément |
Description |
|---|---|---|
|
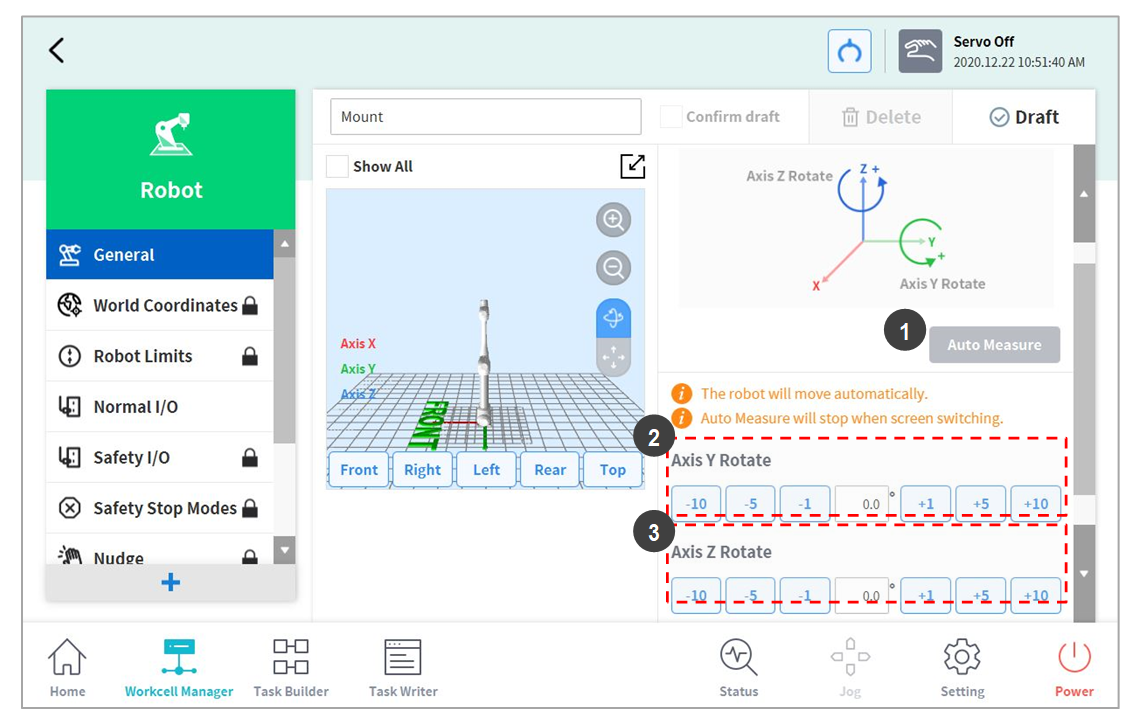
1 |
Auto Calculate |
Calcule l'angle d'installation du robot automatiquement. |
|
2 |
Y-axis Rotation Setting |
Entre l'angle de l'axe Y du robot lors de l'installation. |
|
3 |
Z-axis Rotation Setting |
Entre l'angle de l'axe Z du robot lors de l'installation. |
Appuyez sur le bouton Auto Calculate (Calcul auto) pour calculer la valeur d'inclinaison automatiquement. La fonction Auto Calculate (Calcul auto) de la position d'installation peut être utilisée lorsque la base du robot est inclinée de plus de 5 degrés par rapport au sol. La fonction Auto Calculate (Calcul auto) de la position d'installation du robot permet une configuration simple de la position d'installation requise par les fonctions d'apprentissage direct, le contrôle de la force et le contrôle de conformité sans avoir à saisir les valeurs d'angle d'installation précises. Toutefois, la précision de la position absolue de la configuration de la position du robot calculée automatiquement peut être inférieure à celle des valeurs mesurées avec précision.
Scroll conditional content Les modèles de la série H ne prennent pas en charge les fonctions de position d'installation du robot. L'installation doit être effectuée sur le sol. 1m/hseries Scroll conditional content Auto Calculate (Calcul auto) n'est pas pris en charge dans les modèles sans capteurs de couple de force 2aseries