|
No. |
Élément |
Description |
|---|---|---|
|
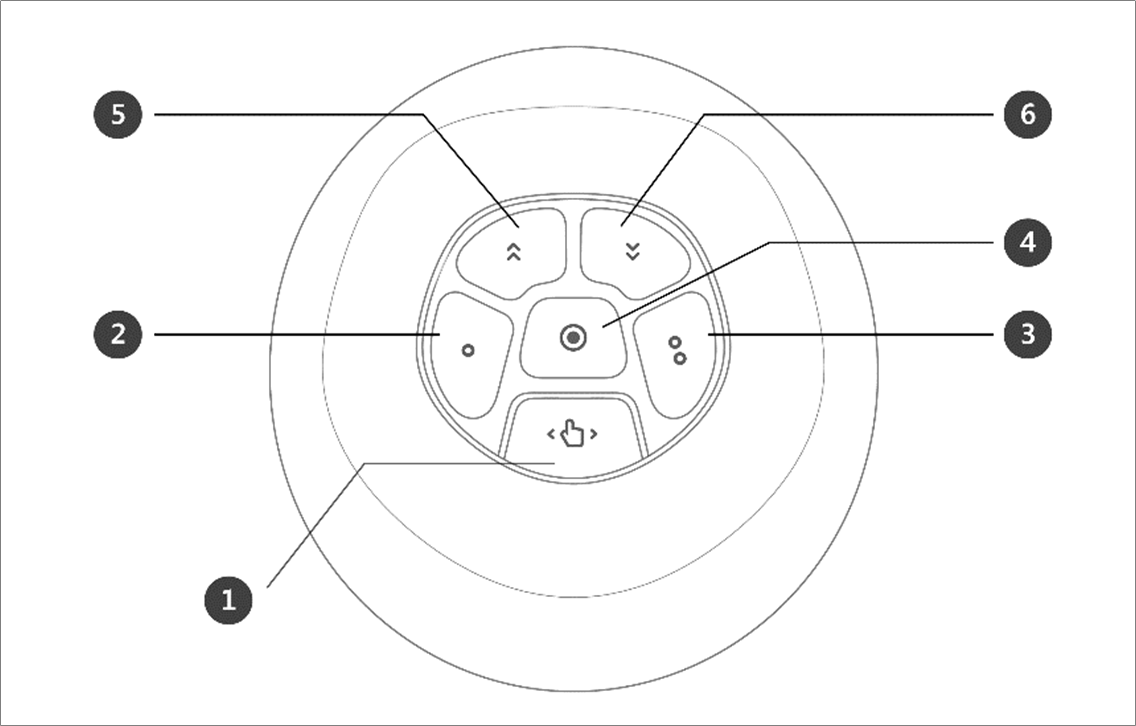
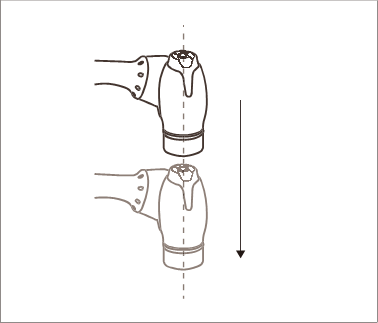
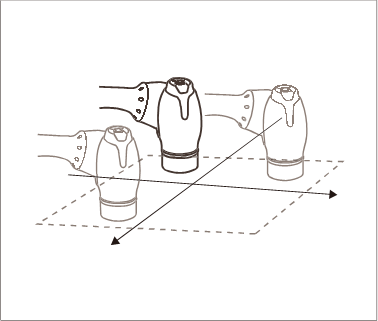
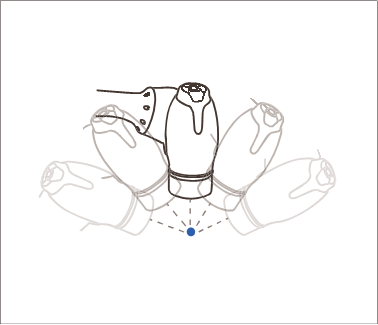
1 |
Hand-Guiding Button |
Ce bouton permet d'ajuster ou de modifier la position du robot. |
|
2,3 |
Bouton de réglage utilisateur |
Ce bouton permet de modifier la position du robot en saisissant une position conformément à une condition de verrouillage correspondant à un mode.
Pour plus d'informations à propos des paramètres, référez-vous à « (2.12.2-fr_FR) Configuration du cockpit» |
|
4 |
Save Pose Button |
Enregistre la position actuelle du robot. Pour plus d'informations, référez-vous à « (2.12.2-fr_FR) Configuration du point de travail de commande de compétence avec les boutons du cockpit. » |
|
5 |
One Line Up |
Déplace la mise au point affichée à l'écran d'une ligne vers le haut |
|
6 |
One Line Down |
Déplace la mise au point affichée à l'écran d'une ligne vers le bas |
Remarque – Modification des réglages du cockpit
-
Les paramètres du



-
L'appui sur le bouton Save Pose (Enregistrer la position) dans l'écran Skill Setting (Configuration des compétences) déplacera automatiquement la mise au point vers la position suivante.
-
Le bouton Cancel (Annuler) peut uniquement être utilisé dans la fenêtre Skill Setting (Configuration des compétences) qui gère les positions multiples.