-
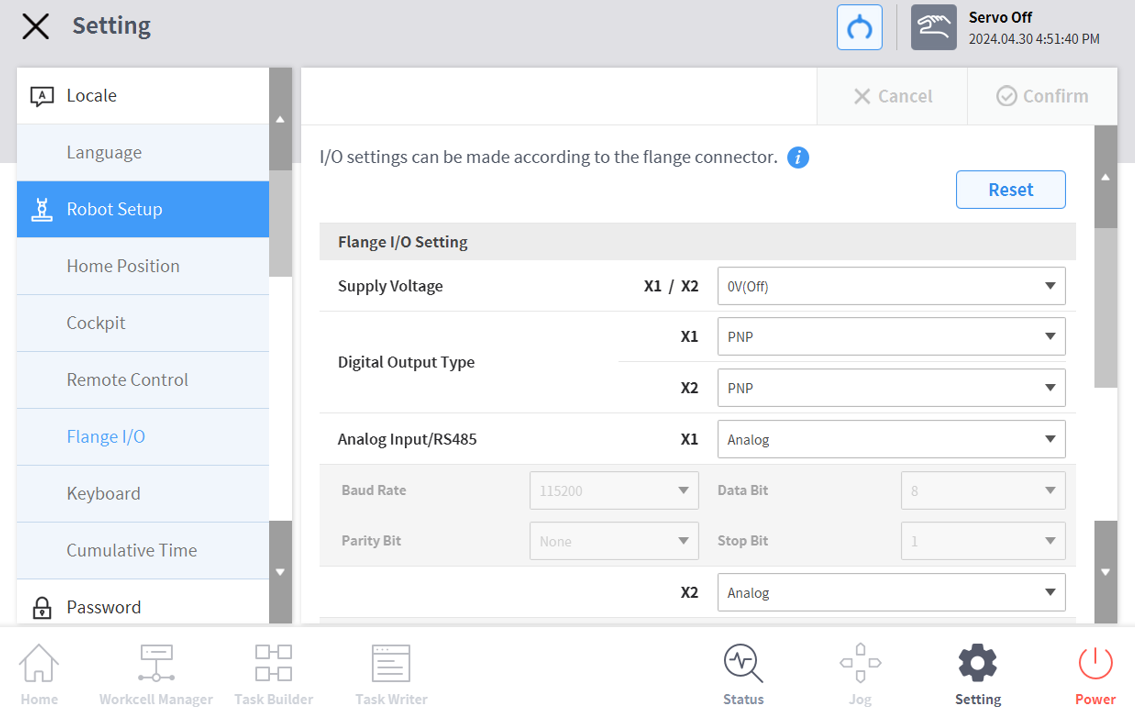
Dans la zone de menu Paramètres, sélectionnez le menu Bride I/O dans Paramètres du robot (visible uniquement lorsqu'une nouvelle bride est connectée).
-
Les informations actuellement définies apparaissent dans la fenêtre Gestion des paramètres.
-
-
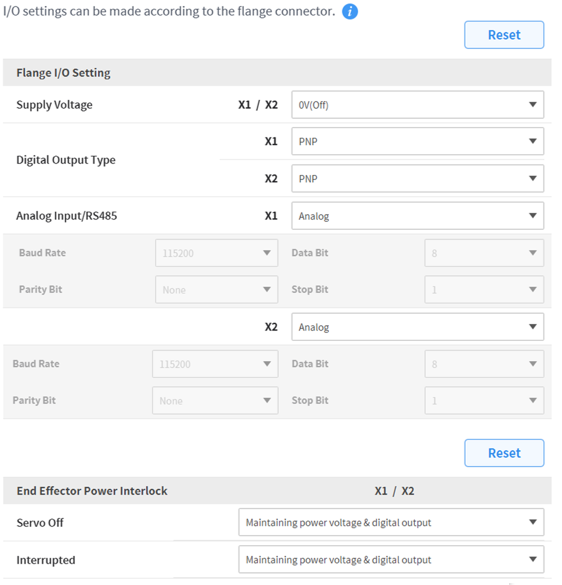
Modifier les options dans les paramètres d'E/S de la bride (X1/X2)
-
Tension d'alimentation
-
Fonction d'alimentation 0V/12V/24V(par défaut)
-
-
Type de sortie numérique
-
PNP / NPN
-
-
Entrée analogique/RS485
-
Utilisez les ports X1/X2 comme entrée analogique ou RS485
-
Lors de la sélection de RS485, veuillez définir le débit en bauds, le bit de données, le bit de parité et le bit d'arrêt.
-
-
-
Modifier les options pour le verrouillage de l'alimentation de l'effecteur final
-
Servo désactivé
-
Maintien de la tension d'alimentation et de la sortie numérique
-
Commutez la tension d'alimentation et la sortie numérique sur 0 V et revenez au dernier état lorsque le servo est activé.
-
-
Interrompu
-
Maintien de la tension d'alimentation et de la sortie numérique
-
Commutez la tension d'alimentation et la sortie numérique sur 0 V et revenez au dernier état lors de la réinitialisation.
-
-
-
Une fois terminé, appuyez sur le bouton OK.
-
La configuration de votre environnement pour utiliser les E/S à bride est maintenant terminée.
-
Remarque
-
La série A affiche uniquement X1.